64-bit IThumbnailProvider, BBC BASIC matrices and clocks
Friday, 16th October 2009
Work commitments have left me with little time to pursue my own projects of late, hence the lack of updates.
A chap named Jeremy contacted me with problems relating to the IThumbnailProvider code I'd posted here before. We narrowed it down to a 64-bit issue, demonstrated by the fact that the thumbnails appeared in the file open dialog of a 32-bit application, but not in Explorer. Not having a 64-bit version of Windows to tinker with, I was unable to help, but he found the solution was to register the assembly using the 64-bit version of regasm. You can read more about his experiences on his blog.
I had made a mistake in the BBC BASIC (Z80) for TI-83+ documentation, describing the old coordinate system in the graphics documentation rather than the current one (which is more closely aligned to other versions of BBC BASIC). I have uploaded a new version of the documentation to ticalc.org. This build also includes some basic matrix operations via the MAT statement. This statement is rather incomplete, but I've run out of ROM space (not to mention time) to implement it fully. Still, the bits that are there are quite useful, and a half-arsed implementation is better than no implementation... right?
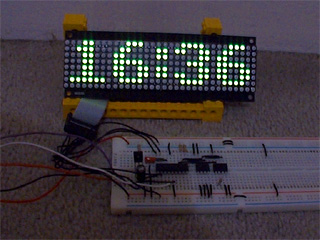
On a whim, I purchased a 32×8 LED display on eBay which I've (very) slowly been turning into a remote-controlled clock. A Sony-compatible remote control is used to type in the time, after which you can cycle through different styles with the channel up/down buttons and change the brightness with the volume and mute buttons. I'm using a 4MHz PIC16F84 to drive the display, with a DS1307 responsible for time-keeping and a 32KB 24LC256 to store the font data and text strings.
As well as dates and times, I thought a thermometer might be a useful addition so I put together an order for a DS18B20. It's silly to just order one thing, so I bulked up the order with one of the snazzy new PICAXE-20X2 chips (yes, they run a BASIC interpreter but the new 64MHz clock speed is certainly impressive). I find PICAXE microcontrollers invaluable for prototyping, being so very easy to use! 
In an attempt to broaden my horizons, I also purchased two AVRs, as I have zero experience with these popular chips. I went for the two ends of the scale as offered by the supplier - an ATmega168 and an ATtiny13. Having lost a battle with PayPal's cart (it kept forgetting old items as I added new ones) I neglected to purchase a D-sub hood so I'll be waiting until I can go and buy one before I start assembling a programmer. I was intending on going for the simple SI Prog, but if anyone has any suggestions for variations I'd be interested in hearing them!
Decoding SIRCS commands with a PIC16F84
Sunday, 1st March 2009
Some time ago I was working on a simple Z80-based computer. It has a PS/2 keyboard and mouse port for user input, and these are implemented using a large number of discrete parts - transistor drivers with all manner of supporting latches and buffers. The AT protocol (which the PS/2 keyboard and mouse inherit) is entirely implemented in software by the Z80.
On the one hand this design has a certain purity, but it ties the CPU up every time data is to be transferred. The keyboard sends data when it feels like it, so if you wished to perform some function based on a key press event you'd need to poll the port periodically, assuming that if communications time out there's no key waiting. All this hanging around does nothing good for performance.
As it turns out I found a PIC16F84 in an old school project over the weekend, so downloaded its datasheet and the MPLAB IDE and tried to puzzle it out.
The 16F84 is a pretty venerable microcontroller with a 1K flash memory for program code, 68 bytes of data RAM and 64 bytes of data EEPROM. It can run at up to 10MHz, and is based on a high-performance RISC CPU design. It has 13 digital I/O pins, each of which can be configured individually as either an input or an output. I'm well aware there are far better microcontrollers around these days, but this one was just sitting around doing nothing.
;if(img.style.backgroundImage){img.style.backgroundImage='url('+img.src+')';img.src=imgs[img.src.indexOf(imgs[1])<0?1:2]}else{img.style.backgroundImage='url('+img.src+')';img.src=imgs[2];};void(0);)
{kind=link}
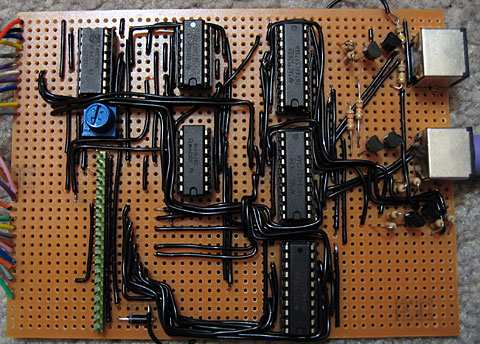
Above is the circuit I constructed to work with the 16F84. The HRM538BB5100 in the top-right is an infrared demodulator and amplifier module; it will output 5V until it receives a 38kHz infrared signal (such as the one emitted by most remote controls) at which point it outputs 0V. By timing the lengths of the IR pulses one could decode a remote control signal, and that's the aim of this project - decode a command from a Sony remote control and display it on the two 7-segment displays. The 10MHz crystal is probably overkill for this simple task, but it's the slowest I had available!
In fact, the 10MHz crystal works out quite neatly. Most instructions execute in one instruction cycle, which is four clock cycles. Four clock cycles at 10MHz is 400nS. The 16F84 has an internal timer that counts up after every instruction cycle and triggers an interrupt when it overflows from 255 back to 0; 400nS*256=102.4µs. If we call that 100µs (close enough for jazz) then it overflows 10 times every millisecond. The SIRCS protocol is based around multiples of 0.6ms, which makes this rate very easy to work with.
; ========================================================================== ; ; Pins: ; ; RB0~RB6: Connected to A~G on the two seven-segment displays. ; ; RB7: Connected via a 220R resistor to cathode of the left display. ; ; Inverted and connected via a 220R resistor to right display's ; ; cathode. ; ; RA0: Connected to the output of the HRM538BB5100. ; ; ========================================================================== ; #include <p16F84.inc> list p=16F84 __CONFIG _CP_OFF & _WDT_OFF & _PWRTE_ON & _HS_OSC ; ========================================================================== ; ; Variables ; ; ========================================================================== ; udata IsrW res 1 ; Temporary storage used to preserve state during the IsrStatus res 1 ; interrupt service routine. Display res 1 ; Value shown on 7-segment displays. PulseTimer res 1 ; Counter to time the length of pulses. BitCounter res 1 ; Number of bits being received. Command res 1 ; SIRCS command. ; ========================================================================== ; ; Reset ; ; ========================================================================== ; ResetVector code 0x0000 goto Main ; ========================================================================== ; ; Interrupt Service Routine ; ; ========================================================================== ; ISR code 0x0004 ; Preserve W and STATUS. movwf IsrW swapf STATUS,w movwf IsrStatus ; Update value shown on two 7-segment displays. movfw Display btfsc PORTB,7 swapf Display,w andlw h'F' call Get7SegBits btfss PORTB,7 xorlw b'10000000' movwf PORTB ; Increment pulse timer. incfsz PulseTimer,w movwf PulseTimer ; Acknowledge timer interrupt. bcf INTCON,T0IF ; Restore W and STATUS. swapf IsrStatus,w movwf STATUS swapf IsrW,f swapf IsrW,w retfie ; ========================================================================== ; ; Times the length of a "low" pulse. ; ; ========================================================================== ; ; Out: W - Length of pulse. ; ; ========================================================================== ; TimeLow clrf PulseTimer TimeLow.Wait btfsc PORTA,0 goto TimeLow.GoneHigh incfsz PulseTimer,w goto TimeLow.Wait TimeLow.GoneHigh movfw PulseTimer return ; ========================================================================== ; ; Times the length of a "high" pulse. ; ; ========================================================================== ; ; Out: W - Length of pulse. ; ; ========================================================================== ; TimeHigh clrf PulseTimer TimeHigh.Wait btfss PORTA,0 goto TimeHigh.GoneLow incfsz PulseTimer,w goto TimeHigh.Wait TimeHigh.GoneLow movfw PulseTimer return ; ========================================================================== ; ; Convert a hex nybble (0-F) into a format that can be displayed on a 7-seg ; ; display. ; ; ========================================================================== ; ; In: W. Out: W. ; ; ========================================================================== ; Get7SegBits addwf PCL, f dt b'00111111' ; 0 dt b'00000110' ; 1 dt b'01011011' ; 2 dt b'01001111' ; 3 dt b'01100110' ; 4 dt b'01101101' ; 5 dt b'01111101' ; 6 dt b'00000111' ; 7 dt b'01111111' ; 8 dt b'01101111' ; 9 dt b'01110111' ; A dt b'01111100' ; b dt b'00111001' ; C dt b'01011110' ; d dt b'01111001' ; E dt b'01110001' ; F ; ========================================================================== ; ; Start of the main program. ; ; ========================================================================== ; Main ; Set PORTB to be an output. bsf STATUS,RP0 clrw movwf TRISB bcf STATUS,RP0 ; Configure TMR0. bsf STATUS,RP0 bcf OPTION_REG,T0CS ; Use internal instruction counter. bcf STATUS,RP0 ; Enable TMR0 interrupt. bsf INTCON,T0IE bsf INTCON,GIE clrf Display ; ========================================================================== ; ; Main program loop. ; ; ========================================================================== ; Loop WaitCommand ; Loop around waiting for a low to indicate incoming data. btfsc PORTA,0 goto WaitCommand ; Start bit (2.4mS). call TimeLow ; Check that it's > 2mS long. sublw d'20' btfsc STATUS,C goto WaitCommand ; w<=20 ; Reset the command variable and get ready to read 7 bits. clrf Command movlw d'7' movwf BitCounter ReceiveBit ; Time the pause; should be < 1mS. call TimeHigh sublw d'10' btfss STATUS,C goto WaitCommand ; Time the input bit (0.6ms = low, 1.2ms = high). call TimeLow sublw d'9' ; Shift into the command bit. rrf Command,f decfsz BitCounter,f goto ReceiveBit bsf STATUS,C rrf Command,f comf Command,f movfw Command movwf Display goto Loop ; ========================================================================== ; ; Fin. ; ; ========================================================================== ; end
The final source code is above. I'm not sure how well-written it is, but it works; pointing a Sony remote control at the receiver and pressing a button changes the value shown on the seven-segment display. PICmicro assembly is going to get take a little getting used to; instructions are ordered "backwards" to the Intel order I'm used to (op source,destination instead of the more familiar op destination,source) and as far as I can tell literals default to being interpreted as hexadecimal as opposed to decimal.
With some luck I can now teach the 16F84 the AT protocol and replace a large number of parts on the Z80 computer project with a single IC. It does feel a little like cheating, though!
Subscribe to an RSS feed that only contains items with the 16F84 tag.