360 degree photos from Lego, a PICAXE, C# and JavaScript
Friday, 9th July 2010
As you may have guessed from the ratio of photos to actual content in my entries I do quite enjoy taking photos of things. One of the reasons I enjoy working with electronics over writing software for computers is that a finished product results in something physical, which I find much more rewarding than a purely virtual hobby.
One type of photograph I particularly enjoy on other websites is the interactive 360° view of a product. The ability to click and drag to rotate an object on the screen makes it seem more real.
What do you need to take this sort of photograph and show it on a web page? There are four components I could think of:
- A rotating platform that could be controlled to rotate to a specific angle.
- A fixed camera that can be triggered once the platform has advanced to the correct angle.
- A way to combine all of the photos taken at different angles into a single file.
- An piece of code that would allow the user to rotate the object on-screen and display the correct single view of the object.
My final solution is a bit of a Heath Robinson affair but it seems to work quite well!
The rotating platform
The most obvious way to build such a platform is to use a stepper motor, as that is specifically designed to be positioned to a particular angle. The problem is that I don't have any stepper motors, and even if I did it would be quite tricky to connect one to a platform. A more practical alternative is to use something I do have — Lego Technic.
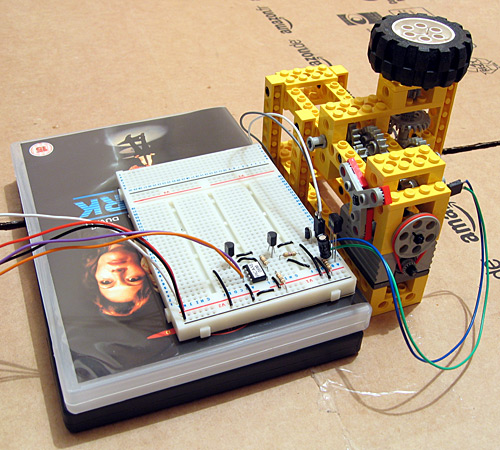
A Lego motor cannot be set to rotate to a particular position, so some additional electronics are required. The motor drives a worm gear which in turn rotates a three-bladed propeller relatively slowly (shown with red pieces attached to it in the photo). This propeller cuts the path of a beam of infra-red light between an LED and an infra-red receiver module. A microcontroller (in this case, a PICAXE-08M) is used to advance the platform in steps by switching the motor on, waiting for the beam to be unblocked, waiting for the beam to be blocked again then switching the motor off. The gears I am using have twenty-four or eight teeth, so each pair of gears divides the rotational speed by 24/8=3. I am using four pairs of gears which results in a division of 34=81. The propeller has three blades which further divides the rotational speed by three resulting in the ability to set the platform to 81×3=243 distinct angles.
' This code is for a PICAXE-08M #PICAXE 08M ' This pin is used to generate the 38kHz IR carrier. It should be connected to the IR LED's cathode (-). Symbol IRPwmPin = 2 ' This pin is connected to the IR demodulator's output. Symbol IRReceiverPin = Pin3 ' This pin is connected to the motor enable output. Symbol MotorPin = 4 Symbol SerialControlIn = 1 ' The desired position of the "stepper" motor. Symbol StepDesired = B8 ' The current position of the "stepper" motor. Symbol StepCurrent = B9 Symbol StepDesiredConfirm = B10 Symbol StepDesiredPotential = B11 ' Returned from the CheckBeam routine. Symbol BeamBlocked = B12 ' Rather than spin once at a time (slow) spin up to this many times between exchanging position information with the computer. Symbol SpinLoopCount = 3 ' Stores the spin loop time. Symbol SpinLoop = B13 ' The number of steps in a complete revolution. Symbol TotalSteps = 243 Main: ' Reset the current and desired steps. StepDesired = 0 StepCurrent = 0 ' Switch the motor off. Low MotorPin 'StepDesiredConfirmCount = 0 Do ' Fetch the desired position. SetFreq M8 SerIn SerialControlIn, N4800_8, (CR, LF), #StepDesiredPotential, #StepDesiredConfirm SetFreq M4 ' Check the received data - the second value should be the logical inversion of the first. StepDesiredConfirm = Not StepDesiredConfirm If StepDesiredPotential = StepDesiredConfirm Then StepDesired = StepDesiredPotential End If ' Adjust the position if required. For SpinLoop = 1 To SpinLoopCount ' Broadcast the current step position. SerTxd(#StepCurrent, ",", #StepDesired, CR, LF) ' Do we need to run the motor? If StepCurrent <> StepDesired Then ' Switch the motor on. High MotorPin Pause 20 ' Wait for the beam to be unblocked. Do GoSub CheckBeam Loop Until BeamBlocked = 0 Pause 20 ' Wait for the beam to become blocked again. Do GoSub CheckBeam Loop Until BeamBlocked = 1 ' Switch the motor off. Low MotorPin ' Increment step current to indicate a change of step. Inc StepCurrent If StepCurrent = TotalSteps Then StepCurrent = 0 End If End If Next SpinLoop Loop ' Checks whether the beam is blocked or not. ' Returns BeamBlocked = 0 for an unblocked beam, BeamBlocked for a blocked beam. CheckBeam: PwmOut IRPwmPin, 25, 53 ' 38kHz, calculated via PICAXE->Wizards->pwmout Pause 1 BeamBlocked = IRReceiverPin PwmOut IRPwmPin, Off Return
The BASIC program on the PICAXE constantly outputs the current position and desired position via the serial programming cable as ASCII in the format <current>,<desired><CR><LF>. It also checks for the desired position every loop on via a serial input pin (sadly not the one used for programming the PICAXE as that is not permitted on the 08M) in the format <CR><LF><desired>,<~desired>. (again in ASCII). The desired position is transmitted twice, once normally and the second time inverted (all zero bits set to one and all one bits set to zero) as a simple form of error detection; should the second value received not be a logical inversion of the first then the value is discarded.
A copy of the schematic can be downloaded by clicking the above thumbnail. It is pretty simple; serial data is input on pin IN1 (move the serial input from the programming cable from SERIAL_IN to IN1), an IR LED is driven from pin PWM2 via a current-limiting resistor, an IR receiver sends its input to pin IN3, a Darlington pair drives the motor via pin OUT4 and information is sent out via the SERIAL_OUT pin (no need to move the programming cable for that one).
Triggering the camera
My camera does not have a standard remote control, but does has some software that allows you to capture shots when it's connected to your USB port. Unfortunately the Canon PowerShot SDK is rather old and is no longer maintained, which means that any software that uses it is bound to its bugs and limitations. One of its bigger problems is that it doesn't work on Vista; by setting the Remote Capture utility into XP compatibility mode I could set up a shot and see a live viewfinder but attempting to release the shutter caused the app to hang for about a minute before claiming the camera had been disconnected.
Fortunately VirtualBox emulates USB and serial ports so I set up Windows XP in a virtual machine and installed the Remote Capture utility. It still doesn't work very well (taking about thirty seconds between releasing the shutter and transferring the image) but it's better than nothing.
To control platform I use the following C# code. It's very poorly written (you need to make sure that you quickly set the Remote Capture application as the foreground window when you start it, for example, and it has a hard-coded 10 second delay after taking the photo to transfer the photo from the camera to the PC — when my camera's batteries started going flat it started to drop frames).
using System; using System.Globalization; using System.IO.Ports; using System.Text; using System.Text.RegularExpressions; using System.Threading; using System.Windows.Forms; using System.Diagnostics; using System.Linq; class Program { const int StepsInRevolution = 243; enum ApplicationState { AligningStepper, WaitingStepperAligned, WaitingStartPistol, Photographing, Exiting, } static void Main(string[] args) { StringBuilder receivedData = new StringBuilder(); using (var serialPort = new SerialPort("COM1", 4800, Parity.None, 8, StopBits.Two)) { serialPort.WriteTimeout = 1; serialPort.Open(); var packetFieldsRegex = new Regex(@"^(\d+),(\d+)$"); int? currentPosition = null; int desiredPosition = 0; int? confirmedDesiredPosition = null; int startPosition = 0; int angleCount = 64; int currentAngle = 0; serialPort.DataReceived += new SerialDataReceivedEventHandler((sender, e) => { if (e.EventType == SerialData.Chars) { receivedData.Append(serialPort.ReadExisting()); string receivedDataString; int newLinePosition; while ((newLinePosition = (receivedDataString = receivedData.ToString()).IndexOf("\r\n")) != -1) { var packet = receivedDataString.Substring(0, newLinePosition); receivedData = receivedData.Remove(0, packet.Length + 2); var packetFields = packetFieldsRegex.Matches(packet); if (packetFields.Count == 1) { currentPosition = int.Parse(packetFields[0].Groups[1].Value, CultureInfo.InvariantCulture); confirmedDesiredPosition = int.Parse(packetFields[0].Groups[2].Value, CultureInfo.InvariantCulture); } } } }); ApplicationState appState = ApplicationState.AligningStepper; // Main loop. while (appState != ApplicationState.Exiting) { // Update the stepper position. try { serialPort.Write(string.Format(CultureInfo.InvariantCulture, "\r\n{0},{1}.", desiredPosition, (byte)~desiredPosition)); } catch (TimeoutException) { serialPort.DiscardOutBuffer(); } Thread.Sleep(10); // What are we doing? switch (appState) { case ApplicationState.AligningStepper: if (currentPosition.HasValue) { desiredPosition = (currentPosition.Value + 5) % StepsInRevolution; appState = ApplicationState.WaitingStepperAligned; } break; case ApplicationState.WaitingStepperAligned: if (currentPosition.Value == desiredPosition) { startPosition = desiredPosition; appState = ApplicationState.WaitingStartPistol; //while (Console.KeyAvailable) Console.ReadKey(true); //Console.WriteLine("Press any key to start rotating..."); } break; case ApplicationState.WaitingStartPistol: //while (Console.KeyAvailable) { // Console.ReadKey(true); appState = ApplicationState.Photographing; //} break; case ApplicationState.Photographing: if (currentPosition == desiredPosition) { Console.Write("Taking photo {0} of {1}...", currentAngle + 1, angleCount); SendKeys.SendWait(" "); Thread.Sleep(10000); Console.WriteLine("Done!"); if (currentAngle++ == angleCount) { appState = ApplicationState.Exiting; } else { desiredPosition = (startPosition + (currentAngle * StepsInRevolution) / angleCount) % StepsInRevolution; } } break; } } Console.WriteLine("Done."); Console.ReadKey(true); } } }
It was meant to prompt to press a key before starting to allow you to re-align the object to the starting position (if required) but this would switch focus away from the Remote Capture utility. I'll probably fix this to switch the focus explicitly to the Remote Capture utility before sending the key to trigger a capture, and will also add code that polls the photo destination directory to spot when the file has been downloaded from the camera instead of the hard-coded 10 second delay. Working in the virtual machine and with the buggy Remote Capture utility is a frustrating endeavour so I left it as it is for the time being!
Stitching the photos together
Once the photos had been taken they needed to be stitched together into a single file. I decided to use 64 angles for a complete revolution as this seemed a good trade-off between fine control over rotation and a decent file size. It also allowed the images to be arranged into a neat 8×8 grid.
I first used VirtualDub to crop each image. VirtualDub allows you to open an image sequence and export to an image sequence so it seemed ideal for the task. Once I had the object neatly cropped I stitched all of them together into a large single PNG file using the following C# program:
using System; using System.Drawing; using System.IO; using System.Text.RegularExpressions; class Program { static void Main(string[] args) { var middleImage = 14; // Index of the "middle" (default angle) image. var nameRegex = new Regex(@"Processed(\d{2})"); var images = new Bitmap[64]; try { foreach (var file in Directory.GetFiles(@"D:\Documents\Pictures\Digital Photos\Projects\Line Blanker\Insides 360\Processed", "*.png")) { var matches = nameRegex.Matches(file); if (matches.Count == 1) { images[int.Parse(matches[0].Groups[1].Value)] = new Bitmap(file); } } var maxSize = new Size(0, 0); for (int i = 0; i < images.Length; i++) { if (images[i] == null) { Console.WriteLine("Image {0} missing!", i); } else { maxSize = new Size(Math.Max(images[i].Width, maxSize.Width), Math.Max(images[i].Height, maxSize.Height)); } } using (var finalImage = new Bitmap(maxSize.Width * 8, maxSize.Height * 8)) { using (var g = Graphics.FromImage(finalImage)) { g.PixelOffsetMode = System.Drawing.Drawing2D.PixelOffsetMode.Half; for (int x = 0; x < 8; ++x) { for (int y = 0; y < 8; ++y) { var image = images[(x + y * 8 + middleImage) % images.Length]; if (image != null) { g.DrawImage(image, new Point(x * maxSize.Width + (maxSize.Width - image.Width) / 2, y * maxSize.Height + (maxSize.Height - image.Height) / 2)); } } } } finalImage.Save("out.png"); } } finally { for (int i = 0; i < images.Length; i++) { if (images[i] != null) { images[i].Dispose(); images[i] = null; } } } } }
The program requires that the input images are named Processed00.png to Processed63.png, which is easily arranged when exporting an image sequence from VirtualDub. The resulting image can be tidied up in a conventional image editor.

Embedding the result on a web page
The final bit of code required is to allow the 360° image to be embedded and manipulated on a web page. I opted to use JavaScript for this task as it seemed the lightest and simplest way to work.
if (typeof(Rotate360) == 'undefined') { var Rotate360 = new Class({ Implements : [Options, Events], options : { width : 320, height : 240, container : null, element : null }, sign : function(v) { return (v > 0) ? +1 : (v < 0 ? -1 : 0); }, initialize : function(source, options) { this.setOptions(options); this.source = source; var rotate360 = this; this.element = new Element('div', { 'class' : 'rotate360', styles : { width : this.options.width + 'px', height : this.options.height + 'px', background : 'transparent no-repeat url("' + this.source + '") scroll 0 0' }, events : { mouseenter : function(e) { if (typeof(rotate360.mouseHandlerDiv) != 'undefined') { var myPosition = rotate360.element.getCoordinates(); rotate360.mouseHandlerDiv.setStyles({ left : myPosition.left + 'px', top : myPosition.top + 'px', width : myPosition.width + 'px', height : myPosition.height + 'px' }); } } } }); this.mouseHandlerDiv = new Element('div', { styles : { position : 'absolute', cursor : 'e-resize' }, events : { mousemove : function(e) { if (typeof(rotate360.mouseHeld) != 'undefined' && rotate360.mouseHeld && typeof(rotate360.previousPageX) != 'undefined' && typeof(rotate360.previousPageY) != 'undefined') { var currentBackgroundPosition = rotate360.element.getStyle('background-position').split(' '); currentBackgroundPosition[0] = parseInt(currentBackgroundPosition[0]); currentBackgroundPosition[1] = parseInt(currentBackgroundPosition[1]); if (typeof(rotate360.rotateX) == 'undefined') rotate360.rotateX = 0; rotate360.rotateX += (e.page.x - rotate360.previousPageX) / (360 * (rotate360.options.width / 270) / ((rotate360.image.width * rotate360.image.height) / (rotate360.options.width * rotate360.options.height))); var workingAngle = parseInt(rotate360.rotateX); currentBackgroundPosition[0] = -rotate360.options.width * (workingAngle % (rotate360.image.width / rotate360.options.width)); currentBackgroundPosition[1] = -rotate360.options.height * Math.floor(workingAngle / (rotate360.image.height / rotate360.options.height)); while (currentBackgroundPosition[0] > 0) currentBackgroundPosition[0] -= rotate360.image.width; while (currentBackgroundPosition[0] <= -rotate360.image.width) currentBackgroundPosition[0] += rotate360.image.width; while (currentBackgroundPosition[1] > 0) currentBackgroundPosition[1] -= rotate360.image.height; while (currentBackgroundPosition[1] <= -rotate360.image.height) currentBackgroundPosition[1] += rotate360.image.height; rotate360.element.setStyle('background-position', currentBackgroundPosition[0] + 'px ' + currentBackgroundPosition[1] + 'px'); rotate360.previousPageX = e.page.x; rotate360.previousPageY = e.page.y; } else { rotate360.previousPageX = e.page.x; rotate360.previousPageY = e.page.y; } }, mousedown : function(e) { e.stop(); rotate360.mouseHeld = true; rotate360.mouseHandlerDiv.setStyles({ left : 0, width : '100%' }); }, mouseup : function(e) { e.stop(); rotate360.mouseHeld = false; rotate360.element.fireEvent('mouseenter'); } } }).inject(document.body, 'top'); this.image = new Asset.image(this.source, { onload : function() { if (rotate360.options.element) { rotate360.element.replaces(rotate360.options.element); } else if (rotate360.options.container) { rotate360.options.container.adopt(rotate360.element); } } }); } }); window.addEvent('domready', function() { $$('img.rotate360').each(function(rotate360) { var src = rotate360.src.replace(/\.([a-zA-Z]+)$/, '_360.$1'); var img = new Asset.image(src, { onload : function() { new Rotate360(img.src, { width : rotate360.width, height : rotate360.height, element : rotate360 }); } }); }); }); }
The above code requires MooTools (both "core" and "more" for its Asset classes). It can be invoked manually or (preferably) will replace any image with a class of rotate360 with the 360° version — if the file was example.jpg the 360° version would be example_360.jpg.
Examples
I've taken photos of a few of my previous projects using this technique — USB remote control, AVR TV game and VGA line blanker. The process could use some refinement but it certainly seems to work!
Emulators and neatened wiring
Tuesday, 12th August 2008
I've decided to switch to a regular 10MHz Z80 rather than a Z180, given the difficulty of using an SDIP 64. I now have a DIP 40 Z80 ready for use, but as I don't have the programmer for the Flash chip (which will hold the OS) there's not much I can do with it physically. I have therefore cobbled together a basic emulator to help develop some of the software beforehand.
To cut hardware costs I'm going to try and handle input in software. One bit of hardware I'm planning on having is an eight-bit open collector I/O port. Open collector pins float high in their reset state, and any device connected to the pin can drive it low. AT devices (keyboard and mouse) use this type of electrical connection, as does the I2C bus and the TI calculator link port. I can use up the eight pins easily - two pins per AT device (keyboard and mouse) makes four, two pins for the I2C bus and two pins for a TI calculator link port.
The I2C bus I mentioned above is a simple way to enhance the computer once built. There will be one device permanently attached to the bus, a DS1307 real-time clock, which will be used to provide time-keeping functions for the OS as well as generating periodic interrupts (the chip could be configured to trigger an interrupt 100 times a second, useful for timing game logic). I could then leave empty space on the circuit board to add other I2C devices over time, or have a socket on the case that could be used to plug in additional I2C modules.
Now that I have some more tools, namely a desoldering pump, I tidied up the horrible hack job I'd done on the graphical LCD (replacing the multiple wires with a single pin header).
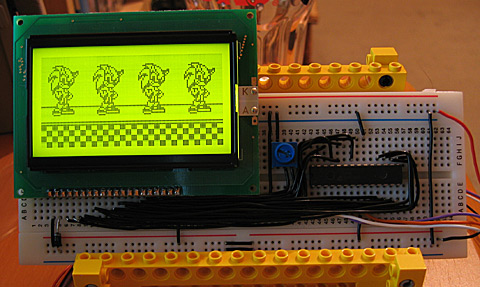
Yes, still the PICAXE here, but I'm using its 256 byte EEPROM to store a 32×64 pixel image of Sonic that is repeated four times horizontally.
I'm still not sure what I'm doing with regards to memory or storage. I'm still working on the simple assumption that ROM is 32KB ($0000..$7FFF) and RAM is 32KB ($8000..$FFFF) but this wastes a lot of memory and isn't very flexible at all. I've planned a bank-switching MMU, but as this will require at least four registers to store what appears in each of the four 16KB windows it will end up being physically very large and painful to wire.
As for storage, I have no idea. I have some 32KB I2C EEPROMs, but 32KB isn't exactly very large. Alternatively, I have an old 512MB SD card, and could try talking to it over bit-banged SPI. (SD cards use 3.3V, though, which complicates matters - not to mention that bit-banged SPI is going to be a little sluggish). I also have a USB module which can talk to USB mass storage devices over a serial connection, so maybe I should add a UART to the project. Adding a fully-blown USB module (which also plays WMA, MP3 and MIDI files) to such an otherwise low-tech computer feels like heresy, though.
Experimenting with a 32KB RAM
Monday, 4th August 2008
The next component I thought I'd experiment with is the RAM. The project is an analogue recorder - a circuit that samples an analogue input periodically and saves it in RAM, and can be configured to play the recorded signal back afterwards.
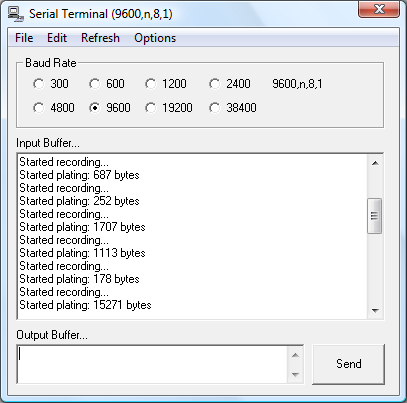
Yes, it says plating.
A single RAM chip offers 32K with an eight-bit word size. This requires fifteen lines to address it, A0..A14. The PICAXE-28X1 that is to control the circuit does not have enough output pins to be able drive this address bus and a data bus (to transfer values to and from RAM) and a still have enough pins left over to control the various components. To get around this, two octal (eight-bit) latches are used to drive the address lines, A0..A7 from one chip and A8..A14 from another. The inputs to these latches are connected to the data bus (PortC on the PICAXE), and two pins on the PICAXE are set aside to trigger the latch enable pins on either latch.
What this means in practice is that if you wished to change the current address to $1234 you would put $34 on the data bus and trigger the latch that corresponds to the least significant byte of the address, then put $12 on the data bus and trigger the latch that corresponds to the most significant byte of the address.
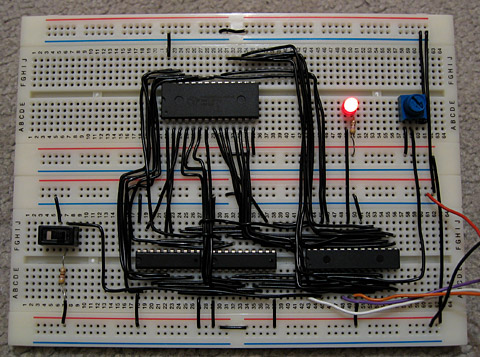
Any hobbyist can have wire insulation in any color that he wants so long as it is black.
A 10K potentiometer provides the required analogue input and an LED provides the output. The switch on the left is used to change between recording and playback modes. The large chip at the top is the RAM, the two small ones in the middle are the octal latches and the medium one on the right is the PICAXE-28X1.
As only 15 lines are needed to address 32KB, the most significant bit of the address bus is wired to the /WE pin of the RAM chip. This pin determines whether we're writing to (low) or reading from (high) the chip. This effectively means that addresses $0000..$7FFF are used when writing and addresses $8000..$FFFF are used when reading.
The only remaining connections to the RAM chip required are chip enable (/CE) and output enable (/OE). When chip enable is low, the RAM chip can be accessed; when high, it ignores all input. When not in use we therefore make sure that chip enable is high. When output enable is low, the RAM chip puts the value at the current address onto the data bus, so we need to pull this low when reading but make sure it's left high most of the time so that the RAM chip doesn't interfere with other devices trying to put a value on the data bus.
The code for the test program is as follows:
; Pins: Symbol RamChipDisable = 4 Symbol RamOutputDisable = 5 Symbol AddressLatch0 = 6 Symbol AddressLatch1 = 7 ; Registers: Symbol RamValue = B0 Symbol RamAddress = W1 ; B3:B2 Symbol RamAddressLow = B2 Symbol RamAddressHigh = B3 Symbol RamPointer = W2 ; B5:B4 Symbol RecordingLength = W3 ; B7:B6 Boot: Let DirsC = $00 High RamChipDisable High RamOutputDisable Low AddressLatch0 Low AddressLatch1 Let RamPointer = 0 SetFreq M8 Main: StartPlaying: SerTxd ("Started playing: ", #RecordingLength, " bytes", CR, LF) Let RamPointer = 0 Pause 100 PlayingLoop: If PortA Pin1 = 1 Then StartRecording ; Read stored value from RAM. Let RamAddress = RamPointer GoSub ReadRam ; Set LED brightness to stored value. Let W4 = RamValue * 4 HPwm PwmSingle, PwmHHHH, %0100, 255, W4 ; Increment playback pointer and loop if hit end. Let RamPointer = RamPointer + 1 If RamPointer = RecordingLength Then RamPointer = 0 EndIf ; Loop back. GoTo PlayingLoop StartRecording: SerTxd ("Started recording...", CR, LF) Let RecordingLength = 0 Pause 100 RecordingLoop: If PortA Pin1 = 0 Then StartPlaying ; Read value from ADC. ReadAdc 0, RamValue ; Set LED brightness to read value. Let W4 = RamValue * 4 HPwm PwmSingle, PwmHHHH, %0100, 255, W4 ; Store value read from ADC into RAM. Let RamAddress = RecordingLength GoSub WriteRam ; Increment record pointer. Let RecordingLength = RecordingLength + 1 GoTo RecordingLoop WriteRam: ; Set up address bus: Let DirsC = $FF Let RamAddressHigh = RamAddressHigh & %01111111 Let PinsC = RamAddressHigh High AddressLatch1 : Low AddressLatch1 Let PinsC = RamAddressLow High AddressLatch0 : Low AddressLatch0 ; Set up data bus and write: Let PinsC = RamValue Low RamChipDisable High RamChipDisable Let DirsC = $00 Return ReadRam: ; Set up address bus: Let DirsC = $FF Let RamAddressHigh = RamAddressHigh | %10000000 Let PinsC = RamAddressHigh High AddressLatch1 : Low AddressLatch1 Let PinsC = RamAddressLow High AddressLatch0 : Low AddressLatch0 ; Set up data bus and read: Let DirsC = $00 Low RamOutputDisable Low RamChipDisable Let RamValue = Pins High RamChipDisable High RamOutputDisable Return
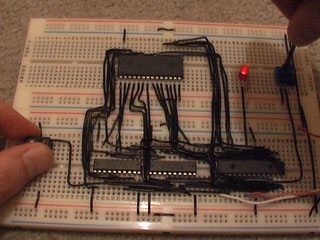
As before, there's a simple video of the circuit in action.
Back to Hardware
Friday, 1st August 2008
I enjoy dabbling with low-level programming, but have never actually built a computer to run these programs. I think it's time to correct that, and as the BBC BASIC project has required me to develop an almost complete Z80 OS (the only thing that's left for the TI-OS to do is manage files) I thought a Z80 computer would be a good start.
The planned specs are (as a starting point):
- 10 MHz Z80180 CPU;
- 64KB RAM (2 32K×8 SRAM chips);
- 128KB Flash ROM;
- Graphical LCD;
- Simple joypad input;
- Keyboard input (AT using either software AT routines or dedicated microcontroller).
The first spanner in the works is the Z80180, as I didn't read the datasheet closely enough and it's in a DIP 64 package with 0.07" pin spacing instead of the standard 0.1" pin spacing. I'll need to find some way of constructing an adapter so I can use it with my breadboards and stripboard. 
In the meantime, I've concentrated on the graphical LCD. I picked a 128×64 backlit graphical LCD for the princely sum of £16. It's very easy to control - you hook up it up to a 8-bit data bus to transfer image data and instructions and a handful of control pins to indicate what you're doing on that bus (reading or writing, whether you're sending an instruction or some image data, that sort of thing) and that's it - the only supporting circuitry it requires is a 10K potentiometer to act as a contrast control and power for the display and backlight.

To experiment with the LCD, I'm using a PICAXE-28X1 microcontroller, programmed in BASIC. There isn't much space to store graphics, so I'm using a 32 character font (at eight bytes per character, that takes up all 256 bytes of free EEPROM space!)
; LCD data bus should be connected to port C. Symbol LcdRegisterSelection = 0 ; D/I : 4 Symbol LcdReadWrite = 1 ; R/W : 5 Symbol LcdStartEnable = 2 ; E : 6 Symbol LcdChipSelect1 = 3 ; CS1 : 15 Symbol LcdChipSelect2 = 4 ; CS2 : 16 Symbol LcdReset = 5 ; /RST : 17 ; Storage for console state variables. Symbol ConsoleX = B10 Symbol ConsoleY = B11 Symbol ConsoleChar = B12 GoSub LcdInit ; Initialise LCD. B0 = %00111111 : GoSub LcdWriteInstruction ; Switch LCD on. GoSub LcdClear ; Clear LCD ; Write the obligatory message to the LCD. ConsoleX = 0 : ConsoleY = 0 ConsoleChar = $08 : GoSub LcdPutChar ; H ConsoleChar = $05 : GoSub LcdPutChar ; E ConsoleChar = $0C : GoSub LcdPutChar ; L ConsoleChar = $0C : GoSub LcdPutChar ; L ConsoleChar = $0F : GoSub LcdPutChar ; O ConsoleChar = $1D : GoSub LcdPutChar ; , ConsoleChar = $00 : GoSub LcdPutChar ; ConsoleChar = $17 : GoSub LcdPutChar ; W ConsoleChar = $0F : GoSub LcdPutChar ; O ConsoleChar = $12 : GoSub LcdPutChar ; R ConsoleChar = $0C : GoSub LcdPutChar ; L ConsoleChar = $04 : GoSub LcdPutChar ; D ConsoleChar = $1B : GoSub LcdPutChar ; ! Pause 2000 B2 = 0 MainLoop: B2 = B2 - 1 B0 = B2 GoSub LcdGotoZ Pause 30 GoTo MainLoop LcdInit: DirsC = $00 ; Set data bus to input. High LcdStartEnable ; We're not writing anything. High LcdChipSelect1 High LcdChipSelect2 Low LcdReset Pause 500 High LcdReset Pause 500 Return LcdWriteInstruction: Low LcdReadWrite DirsC = $FF ; Data bus = output. PinsC = B0 ; Set data bus state. Low LcdRegisterSelection ; Instruction, not data. Low LcdStartEnable High LcdStartEnable DirsC = $00 ; Leave data bus floating. Return LcdWriteData: Low LcdReadWrite DirsC = $FF ; Data bus = output. PinsC = B0 ; Set data bus state. High LcdRegisterSelection ; Data, not instruction. Low LcdStartEnable High LcdStartEnable DirsC = $00 ; Leave data bus floating. Return LcdGotoX: B0 = B0 And 7 B0 = B0 + %10111000 GoTo LcdWriteInstruction LcdGotoY: B0 = B0 And 63 B0 = B0 + %01000000 GoTo LcdWriteInstruction LcdGotoZ: B0 = B0 And 63 B0 = B0 + %11000000 GoTo LcdWriteInstruction LcdClear: For B2 = 0 To 7 B0 = B2 GoSub LcdGotoX B0 = 0 GoSub LcdGotoY B0 = 0 For B3 = 0 To 63 GoSub LcdWriteData Next Next B2 Return LcdPutMap: B1 = B0 * 8 For B2 = 0 To 7 Read B1, B0 GoSub LcdWriteData B1 = B1 + 1 Next B2 Return LcdPutChar: B0 = ConsoleY GoSub LcdGotoX B0 = ConsoleX * 8 If B0 < 64 Then Low LcdChipSelect2 Else Low LcdChipSelect1 B0 = B0 - 64 EndIf GoSub LcdGotoY B0 = ConsoleChar GoSub LcdPutMap High LcdChipSelect1 High LcdChipSelect2 ConsoleX = ConsoleX + 1 If ConsoleX = 16 Then ConsoleX = 0 ConsoleY = ConsoleY + 1 If ConsoleY = 8 Then ConsoleY = 0 EndIf EndIf Return ; Font EEPROM $00,($00,$00,$00,$00,$00,$00,$00,$00,$7E,$7F,$09,$09,$7F,$7E,$00,$00) EEPROM $10,($7F,$7F,$49,$49,$7F,$36,$00,$00,$3E,$7F,$41,$41,$63,$22,$00,$00) EEPROM $20,($7F,$7F,$41,$63,$3E,$1C,$00,$00,$7F,$7F,$49,$49,$49,$41,$00,$00) EEPROM $30,($7F,$7F,$09,$09,$09,$01,$00,$00,$3E,$7F,$41,$49,$7B,$3A,$00,$00) EEPROM $40,($7F,$7F,$08,$08,$7F,$7F,$00,$00,$41,$41,$7F,$7F,$41,$41,$00,$00) EEPROM $50,($20,$61,$41,$7F,$3F,$01,$00,$00,$7F,$7F,$1C,$36,$63,$41,$00,$00) EEPROM $60,($7F,$7F,$40,$40,$40,$40,$00,$00,$7F,$7F,$06,$1C,$06,$7F,$7F,$00) EEPROM $70,($7F,$7F,$0C,$18,$7F,$7F,$00,$00,$3E,$7F,$41,$41,$7F,$3E,$00,$00) EEPROM $80,($7F,$7F,$09,$09,$0F,$06,$00,$00,$3E,$7F,$41,$31,$6F,$5E,$00,$00) EEPROM $90,($7F,$7F,$09,$19,$7F,$66,$00,$00,$26,$6F,$49,$49,$7B,$32,$00,$00) EEPROM $A0,($01,$01,$7F,$7F,$01,$01,$00,$00,$3F,$7F,$40,$40,$7F,$3F,$00,$00) EEPROM $B0,($1F,$3F,$60,$60,$3F,$1F,$00,$00,$7F,$7F,$30,$1C,$30,$7F,$7F,$00) EEPROM $C0,($63,$77,$1C,$1C,$77,$63,$00,$00,$07,$0F,$78,$78,$0F,$07,$00,$00) EEPROM $D0,($61,$71,$59,$4D,$47,$43,$00,$00,$00,$00,$5F,$5F,$00,$00,$00,$00) EEPROM $E0,($02,$03,$59,$5D,$07,$02,$00,$00,$00,$80,$E0,$60,$00,$00,$00,$00) EEPROM $F0,($00,$00,$60,$60,$00,$00,$00,$00,$07,$07,$00,$07,$07,$00,$00,$00)
The code isn't very robust - it doesn't check the state of the LCD's busy flag as I'm assuming that a 4MHz PIC running an interpreted BASIC is too slow to manage to write another byte to the LCD driver before it has finished processing the last one.
The font was generated from the following image (it's the BBC Micro font):
It's rotated through 90° as, unlike the LCD driver in the TI-83+, each byte written outputs 8 pixels vertically, with the least significant at the top. (On the TI-83+, each byte written outputs 8 pixels horizontally, with the most significant bit on the left). More interestingly, this graphical LCD is made up of two 64×64 regions next to eachother, and by controlling two chip select pins you can control whether each byte written updates the left side, the right side, neither or both. I'm entirely sure how I could use this, though, other than not-very-exciting tricks like clearing the LCD extra-fast.

Finally, here's a video of the LCD test in action. It's not very speedy, but will hopefully pick up some speed once I figure out how I'm going to use that Z80180 CPU.
Z80 ASM and PICAXE
Wednesday, 13th April 2005
I've been doing all sorts of odds and ends recently. I've acquired a Sega Game Gear, and so have started taking a look at programming on that - it has a Z80 CPU in there, so the languge isn't an issue, more so the hardware. Ah well, I can display a screen of text and cycle the colours around so far - nothing impressive, but the setup works.
I've also been playing with PICAXE microcontrollers again. Here is a pair of routines that can be used to get/send bytes using the TI hardware link protocol, for example. I am yet to do anything useful with them, however.
Windows programming has never been my favourite side of things, but I have also started work on a Z80 ASM "IDE" called Latenite:
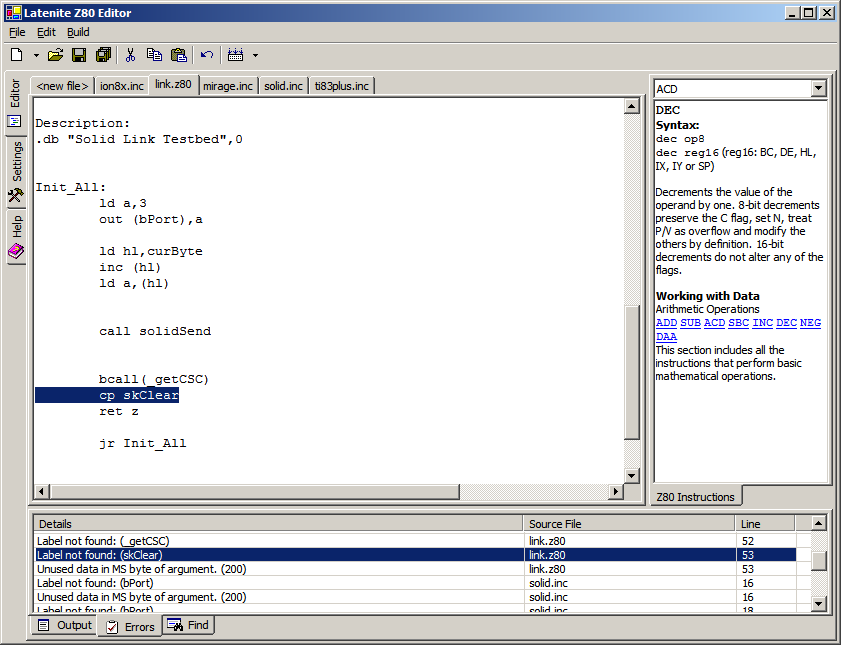{kind=link}
It's mostly there, but now needs features galore to be added. So far it can be used to compile and source code, which is the main thing.
Subscribe to an RSS feed that only contains items with the PICAXE tag.