Adding 11KB of RAM to a CP/M 3 system with a single NAND gate chip
Wednesday, 30th August 2023
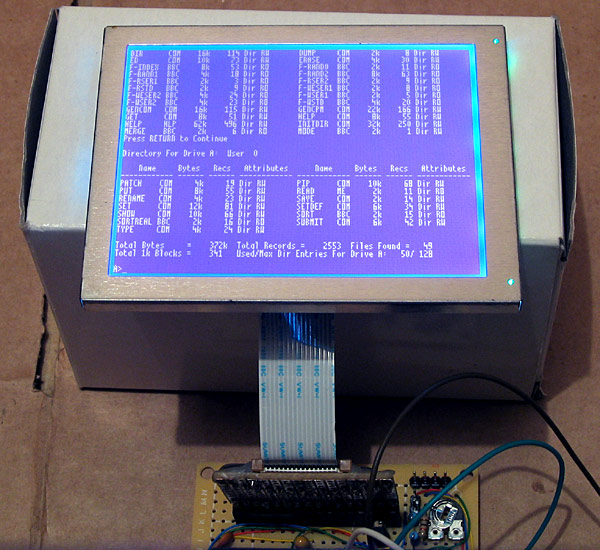
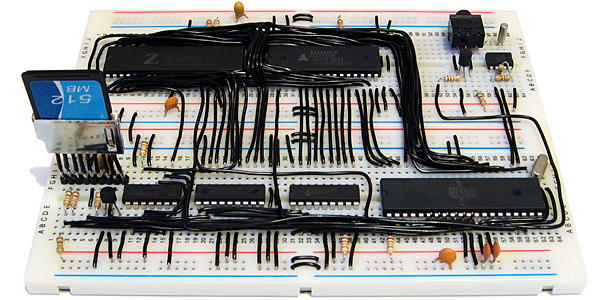
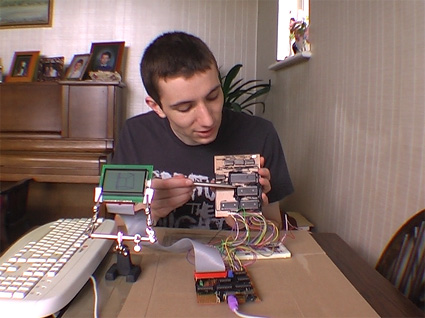
It's been quite a while since I posted about my Z80 Computer project. This is a home-made Z80 computer I built back in 2010 that features a 10MHz Z80 CPU with 64KB RAM that runs CP/M 3. It can drive an internal LCD, TV or VGA monitor at 320x240 (monochrome only) and unfortunately is a project I was never too happy with due to several compromises I had to make in its design – though at the time I was happy enough I got it to work at all! The video output was limited by both my choice to use an internal graphical LCD and the limitations of the dsPIC33F I chose to use to drive it and the software was all a bit half-baked. I could run the generic CP/M version of BBC BASIC on it, but this lacks graphics and sound support, for example.
More recently my work on adapting BBC BASIC to the Sega Master System had reignited my interest in 8-bit programming, though that too was imperfect due to the limitations of the Master System's VDP. I was further encouraged by coming third in the "Retro not Vintage" competition on /r/retrobattlestations, though I'm not sure I was quite worthy of a podium finish.
With this in mind I started work on improving the computer. I replaced the existing dsPIC33F VDP with a new one based around a dsPIC33E. This newer microcontroller has 32KB of RAM and can run at up to 70 MIPS, a big upgrade from the previous 16KB RAM and 40 MIPS. This provides me with enough video RAM to store the largest BBC Micro screen mode frame buffer (20KB) as well as the necessary CPU grunt to look up pixel data from colour palettes and output it to the screen. I've implemented all eight of the standard BBC Micro screen modes, from the high-res 640x256 (in two colours) MODE 0 to the low-res 160x256 (in sixteen colours) MODE 2 along with the Teletext-compatible MODE 7. This is all controlled via a BBC Micro-compatible VDU driver and the results all seem quite faithful with no real compromises.


There was even enough CPU power left over on the microcontroller to implement BBC Micro-compatible SOUND and ENVELOPE, and with the source code for the CP/M version of BBC BASIC having been released since I last worked on the project it made it much easier to add all of the graphics and sound routines into the version of BBC BASIC specific to my computer.
To get an idea of what the computer is like to use, I recorded a little demo video here. However, this is not really what I wanted to write about in this post – I wanted to cover an easy way to free up some RAM by implementing banked CP/M 3.
Non-banked versus banked CP/M
I chose CP/M 3 as the OS for my computer instead of CP/M 2 as I'm using an SD card for storage and CP/M 3 has native support for disk sector sizes that do not directly match the file record size and it will handle the blocking/unblocking for you (CP/M's file records are 128 bytes long, SD card sectors are 512 bytes long). One other nice feature of CP/M 3 is the existence of a "banked" version which allows it to run on systems with more than 64KB of RAM. As far as user programs are concerned they still run in a flat 64KB memory space, however the OS can move certain parts of itself as well as disk and directory buffers into a separate memory bank where they are only accessed when needed, freeing up space in the "transient program area" (TPA). As well as more memory for user programs the banked version provides a much improved line editor when typing at the command-line, password protection of files and more descriptive error messages.
Naturally, when I read about this I thought it would be an obvious choice for my computer. As it is, I'm using a 128KB RAM chip but have tied A16 low as I didn't have any kind of MMU or bank-switching hardware setup (32KB and 128KB RAM chips are available in abundance, 64KB ones less so, and using a 128KB chip with the address line tied low involved a lot less soldering than two separate 32KB RAM chips). I did have an emulator where I could try to prototype the hardware changes to support a banked CP/M 3, however I was not able to get a banked version of the OS built and working so gave up – after all, I had a 49KB TPA, which seemed like it would be good enough.
With the other improvements to the computer recently I thought it worth reinvestigating. I did a bit of hunting to see if I could find any recommendations for a simple setup but most of what I could find ended up being a lot more complicated than what I was really looking for. After a bit more experimentation I was able to end up with a banked version of CP/M running on my computer and all I needed was a single NAND gate chip.
Memory requirements for banked CP/M
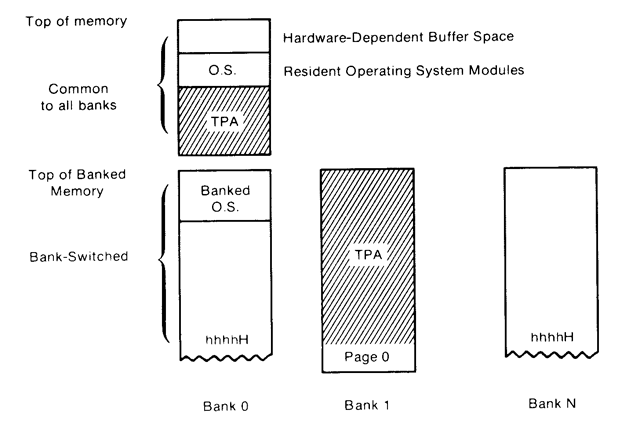
The memory layout of banked CP/M is actually quite a bit simpler than a lot of the threads I could find online seemed to make out. All you really need is a shared common area at the top of memory that will always be accessible regardless of the current state of the selected bank, and memory below that which can be switched between multiple banks. When booting the computer bank 0 will be selected, so both the common (resident) and banked parts can be copied to memory, and then bank 1 will be swapped in to provide the large TPA.
In my case, as I'm using a 128KB RAM chip, I will use A16 as the bank selection bit. When low this will provide access to the lower 64KB RAM on the chip, when high it will provide access to the upper 64KB RAM. To implement the common area at the top of memory, you then just need to check to see if the address is above the boundary between banked and common memory and if so to force A16 either high or low (it doesn't matter which, as long as it's consistent) so that when the address is in the common area the same bank will be accessed, regardless of the state of the bank selection bit.
Bank switching with simple logic
A simple way to implement a common area in upper memory is with AND (to detect the high address) and OR (to force the A16 high if it's a high address) logic, like this:

Here we use a 4-input AND gate to detect any memory address in the top 4KB of the chip (address lines A12 to A15 will go high at %1111000000000000 which gives a common region of $F000 to $FFFF). If that's the case, then the output of the 4-input AND gate will be high, which when ORed with the bank selection bit will force A16 high whenever we're in the common memory area. If we're below the common memory area then the value of the bank selection bit will pass through directly to A16, allowing us to bank switch the lower area of memory. Or, to summarise in a truth table:
| In | Out | ||||
|---|---|---|---|---|---|
| A12 | A13 | A14 | A15 | BANK | A16 |
| 1 | 1 | 1 | 1 | x | 1 |
| 0 | x | x | x | 0 | 0 |
| 0 | x | x | x | 1 | 1 |
| x | 0 | x | x | 0 | 0 |
| x | 0 | x | x | 1 | 1 |
| x | x | 0 | x | 0 | 0 |
| x | x | 0 | x | 1 | 1 |
| x | x | x | 0 | 0 | 0 |
| x | x | x | 0 | 1 | 1 |
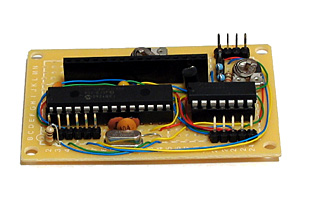
However, it would be easier if we could implement this on a single chip. A 4x 2-input NAND gate chip (such as the SN74ALS00AN) should do the job when wired up as follows:

The truth table is a little different this time around:
| In | Out | |||
|---|---|---|---|---|
| A13 | A14 | A15 | BANK | A16 |
| 1 | 1 | 1 | x | 1 |
| 0 | x | x | 0 | 1 |
| 0 | x | x | 1 | 0 |
| x | 0 | x | 0 | 1 |
| x | 0 | x | 1 | 0 |
| x | x | 0 | 0 | 1 |
| x | x | 0 | 1 | 0 |
When accessing the banked region of memory A16 is the inverse of the bank selection bit. This doesn't matter, though, as long as there's a consistent mapping between logical addresses and the physical RAM addresses it will work even if it's "backwards". There's also one fewer address line, which means that the common area now runs from %1110000000000000 = $E000 to $FFFF, providing a common area of 8KB. In practice I didn't find this made a difference to the amount of memory available in the TPA; whether the common area was 4KB, 8KB or 16KB I was able to bring the TPA up to 60KB (from 49KB in the non-banked system), though it does eat into the amount of memory available on page 0 for disk and directory buffers. As I'm loading from an SD card (which is much faster than the floppy discs of yore) the reduced buffer space is less of a concern to me.
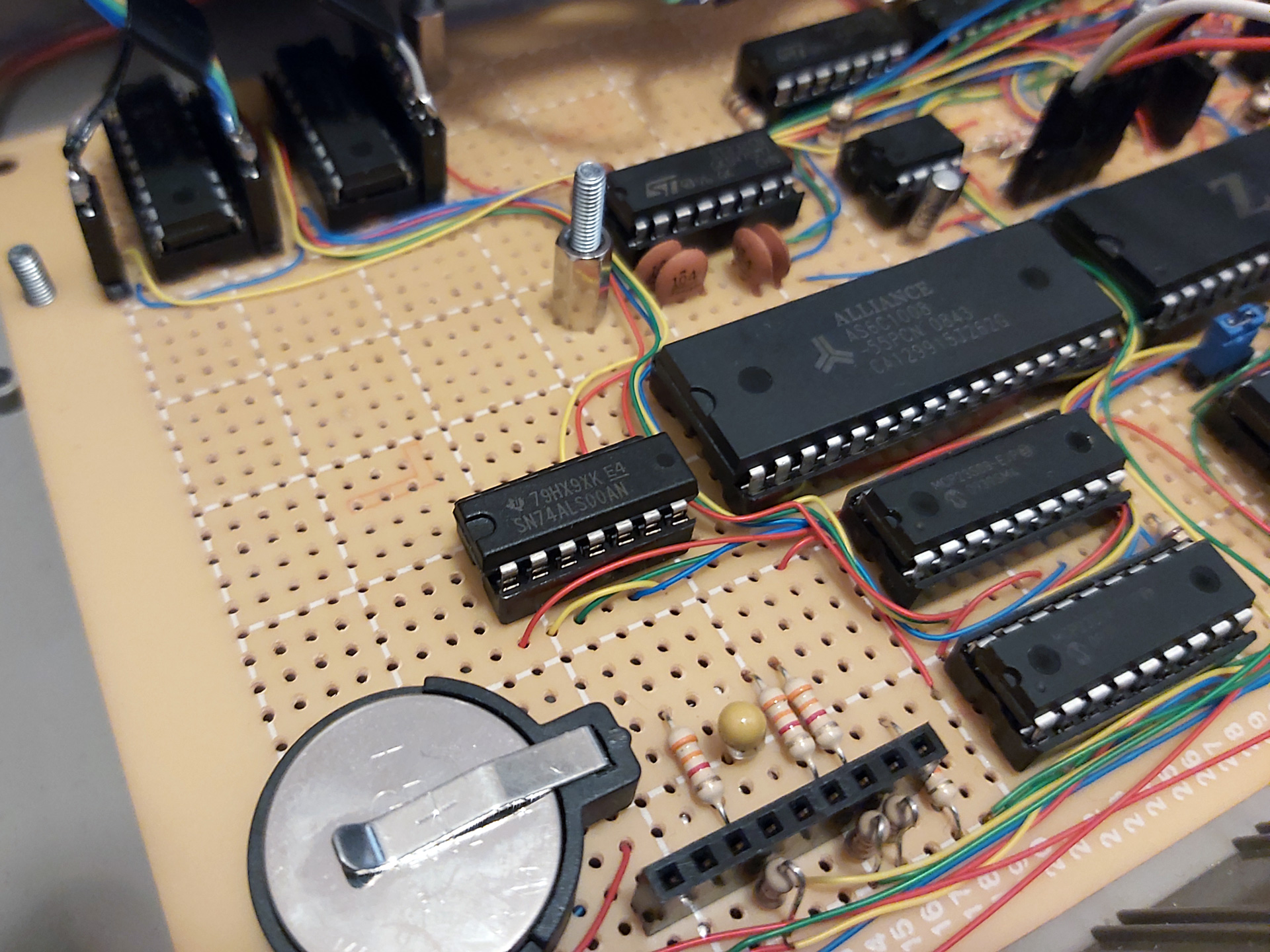
Fortunately there was enough space inside the computer (and a single remaining pin on the I/O controller to act thas bank selection bit) to add the NAND chip and drive A16. At last I have access to 120KB of my 128KB RAM chip... but what about the software?
Building a banked version of CP/M
I will start with the assumption that you have been able to build a non-banked version of CP/M 3 and got that running on your computer, as there is a lot less that can go wrong when doing so. Once you've got that working there's not too much to add to your BIOS to make it support banking, however I did run into a few issues with missing files and some misinterpretation of how things should work until I was able to get it working.
I used the "Developers Build Directory for CP/M 3" from The Unofficial CP/M Web site as my source for CP/M 3. This contains the GENCPM tool that will be used to generate the CPM3.SYS that will need to be loaded into memory by your boot loader. In my case I get my I/O controller to copy CP/M from the SD card into memory at boot – if you've already got the non-banked version of CP/M 3 booting then you'll be familiar with this, but do pay attention to table D-1 in the CP/M 3 system guide which points out the two parts of CP/M to load – the "resident" and "banked" portions. Both parts need to be loaded on a banked system, and both need to be loaded into page 0.
To get that far you will need to have relocatable copies of your banked BIOS (BNKBIOS3.SPR) and the BDOS (RESBDOS3.SPR and BNKBDOS3.SPR) ready to be used by GENCPM. I couldn't find a ready-made copy of these BDOS modules, but you can build them using RMAC and LINK as shown below:
RMAC RESBDOS LINK RESBDOS3=RESBDOS[OS]
PIP BNKBDOS3.ASM=CPMBDOS2.ASM,CONBDOS.ASM,BDOS30.ASM RMAC BNKBDOS3 LINK BNKBDOS3=BNKBDOS3[OS]
The banked BDOS source code is split between three different source files which need to be combined with PIP first, then can be built. For the sake of completeness, if you wanted to build the non-banked BDOS3.SPR you'd use a very similar set of commands, just with CPMBDOS1.ASM instead of CPMBDOS2.ASM:
PIP BDOS3.ASM=CPMBDOS1.ASM,CONBDOS.ASM,BDOS30.ASM RMAC BDOS3 LINK BDOS3=BDOS3[OS]
The other important ingredient is your banked BIOS, BNKBIOS3.SPR. I don't get on with 8080 syntax so I assemble my BIOS3.MAC with Microsoft's M80 in Z80 mode (instead of RMAC).
RMAC SCB RMAC BIOSKRNL M80 =BIOS3 LINK BNKBIOS3[B]=BIOSKRNL,BIOS3,SCB
If you had previously edited BIOSKRNL.ASM to state banked equ false remember to change it to banked equ true as well!
The only additions you should need in your BIOS are implementations of ?xmove and ?bank. ?bank is an easy one, and just switches to the memory bank requested in the A register. In my case I handle that just by outputting A to the I/O port that handles bank switching:
; Select Memory Bank ; Entry Parameters: A=Memory Bank ; Returned Values: None ; You must preserve or restore all registers other than the ; accumulator, A, upon exit. ?bank: if banked out (bank$select),a ; change this for what your hardware requires endif ret
(To retain compatibility with my old banked BIOS I wrap the changes in an if banked condition – banked equ true appears earlier in the file).
?xmove is a little more complicated – this states that the subsequent ?move operation (which copies BC bytes from DE to HL) should transfer data from one memory bank to another. Note that this only affects the next ?move operation; if ?move is called again afterwards without ?xmove then it should perform a copy within the same bank as before.
Fortunately the inter-bank copy is limited to 128 bytes so you can simply implement this by temporarily copying the data from one bank into a 128 byte buffer in common memory, then copying the data back to the destination bank. It's not exactly efficient, but it keeps the hardware simple.
; Memory-to-Memory Block Move ; Entry Parameters: HL=Destination address ; DE=Source address ; BC=Count ; Returned Values: HL and DE must point to ; next bytes following move operation ?move: ex de,hl ldir ex de,hl ret ; Set Banks for Following MOVE ; Entry Parameters: B=destination bank ; C=source bank ; Returned Values: None ?xmove: if banked ; Store the source/destination bank numbers ld (mov$src$b),bc ; Make sure that the next call to move (via ?mov vector) uses the banked move routine. ld bc,banked$move ld (?mov+1),bc ret banked$move: ; Select source bank ld a,(mov$src$b) call ?bank ; Swap registers from CP/M to Z80 conventions ex de,hl ; Preserve destination and length push de push bc ; Copy from source to buffer ld de,mov$buf ldir ; Recover length and destination, preserve source pop bc pop de push hl ; Select destination bank ld a,(mov$dst$b) call ?bank ; Copy from buffer to destination ld hl,mov$buf ldir ; Recover source pop hl ; Swap registers from Z80 to CP/M conventions ex de,hl ; Make sure that the next call to move (via ?mov vector) uses the regular move routine. ld bc,?move ld (?mov+1),bc ret mov$src$b: db 0 mov$dst$b: db 0 mov$buf: ds 128 else ; Unbanked ret endif
This implementation works by changing the ?mov vector in the BIOSKRNL to point at our banked$move routine after a request to ?xmove. Once we've carried out the banked move, the original ?move routine is restored to the ?mov vector.
Once you have assembled and linked your BNKBIOS3.SPR, RESBDOS3.SPR and BNKBDOS3.SPR you can use GENCPM to create your new CPM3.SYS. You'll need to answer some questions differently to support the banked system:
- Bank switched memory? Y.
- Common memory base page? E0 (if using the NAND gate circuit above – our common area starts at $E000).
- Number of memory segments? 1 – we have three in total (bank 0, bank 1 and common) however bank 1 and common are not included in the segment table so should be ignored here.
- Memory segment table base, size, bank: 01, 90, 00 (we want to keep CP/M out of the "zero page" so start the segment from $0100, CP/M 3 starts at $9100 so we have $9100-$0100=$9000 as our size, the bank number is 0).
Before being prompted for the memory segment table GENCPM will display where CP/M 3 itself is using memory so you can use that to figure out how much free space you have on your bank zero for your segment definition. However, if you enter a value that is too large GENCPM will automatically reduce the size for you.
After this you will be prompted to create disk and directory buffers for each of your disk definitions – pay attention to available space to get an idea of how many buffers you can create, but if in doubt just allocate a single buffer for each disk/directory as prompted as that will at least get you booted, then you can experiment with larger buffers later.
I did intentionally start my segment from $0100 instead of $0000 and this is to avoid problems with interrupts and to keep the zero page free. My computer design uses interrupts to signal to the Z80 that keys are available (for example) instead of requiring it to constantly poll the I/O controller. However, I did find that if I interrupted the CPU (e.g. by pressing a key) when it had switched over to page 0 it would hang the computer as the ISR vector had been switched out from underneath it. My ISR is in common memory and I just make sure that when the computer boots it installs its interrupt vectors in every memory bank so that it doesn't matter which is currently swapped in, it'll always find its way to the common ISR.
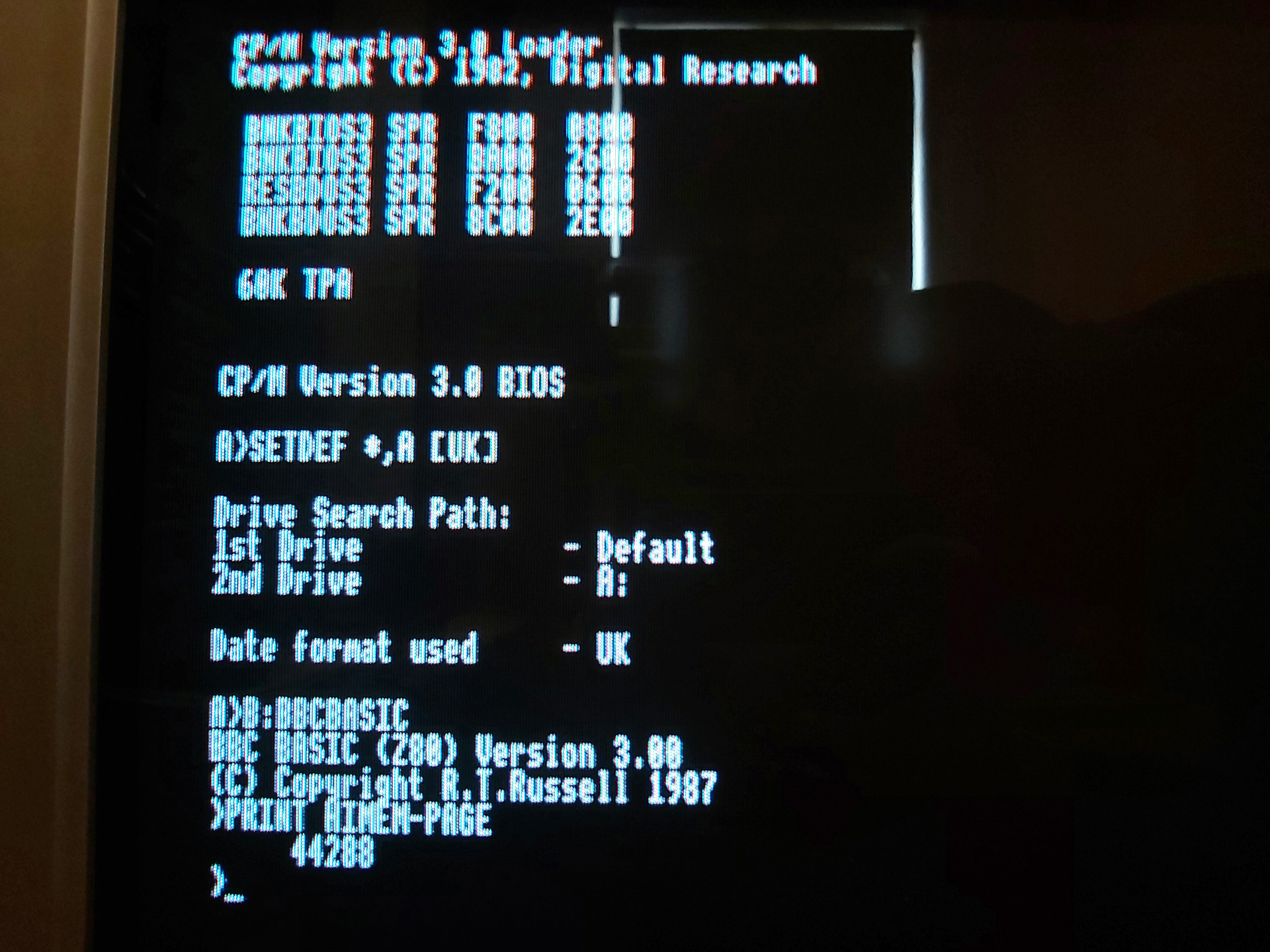
After making these changes I was greeted with a 60KB TPA instead of the previous 49KB TPA – 11KB of extra memory is well worth it, and the improved line editor in CP/M 3 is another nice bonus. I did think that implementing this was going to be a nightmare, but in the end I only needed one extra NAND gate and a few easy changes to the software.
Addendum (31st August 2023): One other change you will need to implement is to support disk operations reading from or writing to specific memory banks. I forgot to mention this earlier as it's handled by the setbnk routine inside BIOSKRNL, and that routine stores the selected DMA bank number in the @dbnk variable. When your BIOS performs a disk read or write operation it will need to preserve the current bank number, switch to the bank number in @dbnk, carry out the read or write operation, then restore the previous bank number.
In my case, disk I/O is handled by the AVR I/O controller where operations are set up by sending over the DMA address, sector and track numbers, drive index and then performing a read from either the "read" or "write" ports to initiate the I/O operation and retrieve the status. The only change required was to make sure that the bank number is also sent over before initiating the I/O request so the AVR knows which bank it should be accessing:
fd$copy$ptrs: ld hl,(@dma) ld a,l out (disk$dma$l),a ld a,h out (disk$dma$h),a ld hl,(@sect) ld a,l out (disk$sector$l),a ld a,h out (disk$sector$h),a ld hl,(@trk) ld a,l out (disk$track$l),a ld a,h out (disk$track$h),a ld a,(@adrv) out (disk$drive),a if banked ld a,(@dbnk) out (disk$dma$bank),a endif ret fd$write: call fd$copy$ptrs in a,(disk$write) ret fd$read: call fd$copy$ptrs in a,(disk$read) ret
I'm pretty sure I didn't forget anything else!
A parallel port and a demonstration of the Z80 computer
Sunday, 5th September 2010
The last piece of hardware to add to the computer was a parallel port. These have eight data lines and nine assorted control and status lines. My last two 8-bit I/O expanders provide sixteen of these seventeen lines, and the final one was provided by the DS1307 real-time clock chip which happily has a spare pin on it that can be used as an output.
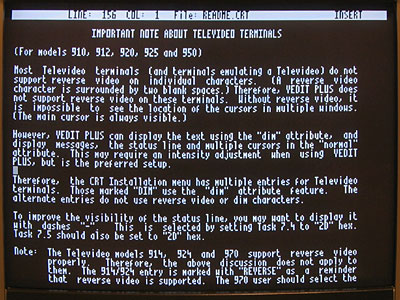
This parallel port can be used to print from the computer. Some software has printing capabilities built in (such as the text editor VEDIT Plus), but by pressing Ctrl+P in CP/M any text sent to the display will be simultaneously sent to the printer.
I also needed to mount the LCD inside the case. I bought a plastic strip to try to make a nice frame for it, but couldn't cut it accurately enough by hand so have had to make do with merely sticking the LCD behind a rectangular hole cut in the aluminium. It's not the neatest arrangement and doesn't protect the LCD from scratches but is better than nothing.
To demonstrate the computer's hardware and software, I recorded a video:

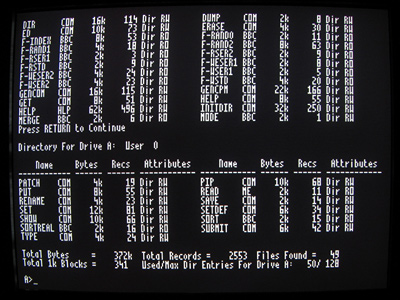
I'm not desperately happy with the way it came out; I really need to find a better microphone and the angle of the sun and variable weather when I made the video threw the white balance off. On the plus side, I did find out how to capture crisp black and white video with my TV capture card; I connected the composite video output from the computer to the luma pins on the S-video input on the capture card, then dropped the saturation to zero in VirtualDub. For some reason this produces great quality video, in comparison to the composite input which produces a fuzzy mess there shouldn't really be any difference with a black and white signal (regular television sets don't have any problems).
A clock and a serial port for the Z80 computer
Tuesday, 17th August 2010
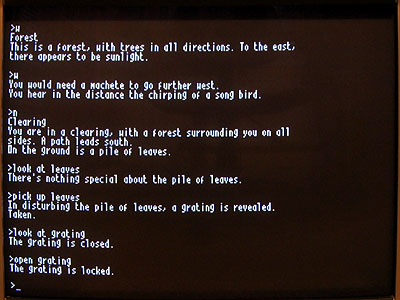
At the end of the previous entry I mentioned that I was going to start developing my own programs for the Z80 computer. The first is a graphical clock, taking advantage of my implementation of the BBC Micro's VDU commands and the ability to use those commands to draw graphics onto the screen as well as text:
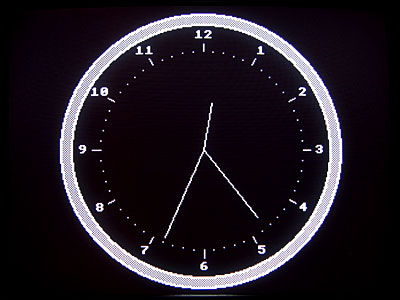
I have uploaded the code and binary to my site for anyone who is interested, though it will only work on a machine running CP/M 3 and that is equipped with a display that implements a handful of BBC Micro VDU commands.
The computer features a display for output and a keyboard for input which is sufficient if you're interacting with a human but it's often nice for computers to be able to speak to eachother, so I've added an RS-232 serial port.
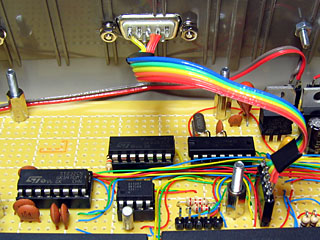
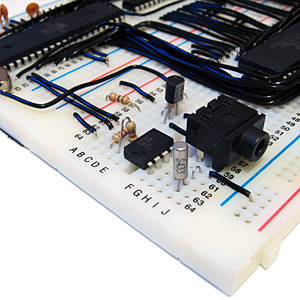
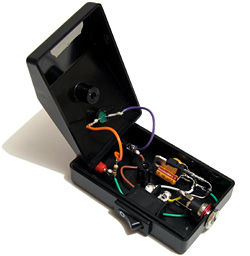
RS-232 is a bit of an unfriendly beast. Whereas the computer's logic uses 0V to indicate a logic low (0, "false") and 5V to indicate a logic high (1, "true") RS-232 uses around +12V for a logic low and -12V for a logic high. This requires that the outgoing signals are inverted and boosted and the incoming signals are inverted and reduced to protect the inputs of the receiver circuit. Fortunately you can easily get hold of chips that perform this task for you when aided by a number of capacitors; in my case I'm using an ST232, which is shown in the bottom left of the above photo. A DE-9M connector is provided on the outside of the case, much like the one you'd find on your desktop if you were trapped in the 1990s.
One issue I have yet to solve is handshaking. The serial port sends or receives data on two wires (TXD and RXD respectively). The receiver has to handle each incoming byte from the transmitter. As the receiver may be busy performing other tasks at the time it may end up receiving data faster than it can process it and it will start losing bytes. There are a number of different ways to avoid this problem. The simplest electronically is to use XON/XOFF handshaking; in this configuration, the receiver can send the XOFF byte to the transmitter when it's busy and the transmitter will stop sending data temporarily. The receiver can then send XON back to the transmitter when it's ready to receive more data. This technique has one major drawback it prevents you from sending binary data containing the XOFF or XON bytes.
An alternative solution is to add two wires to the serial connection Request To Send (RTS) and Clear To Send (CTS). These can be used to signal when each device is available to accept data. This allows you to send XOFF and XON directly over the serial port (extremely useful for binary data) yet requires the addition of two more wires to the port.
Unfortunately whilst implementing both techniques is possible, CP/M only internally refers to XON/XOFF handshaking; there is no way to select RTS/CTS handshaking. I think what I will end up doing is have CP/M's XON/XOFF refer to handshaking in general and then add a hardware-specific utility that lets me choose which particular type of handshaking I wish to use. This utility could also help me select other serial port configuration settings that CP/M doesn't expose (such as parity, number of stop bits or number of data bits).
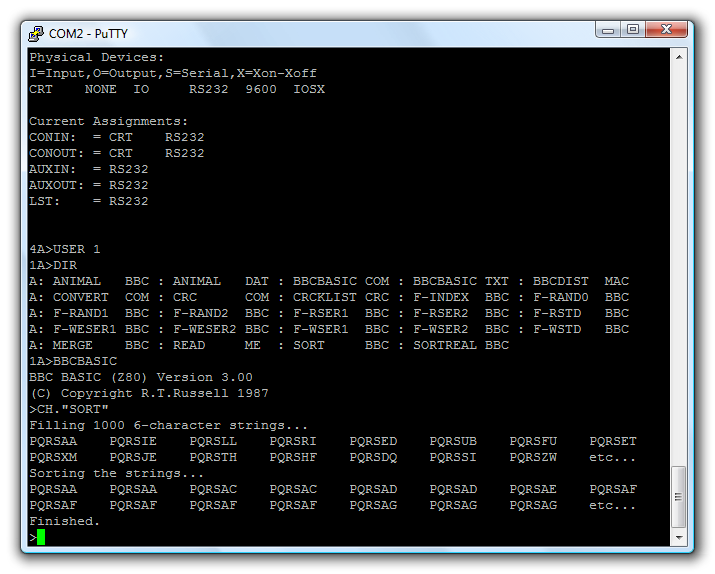
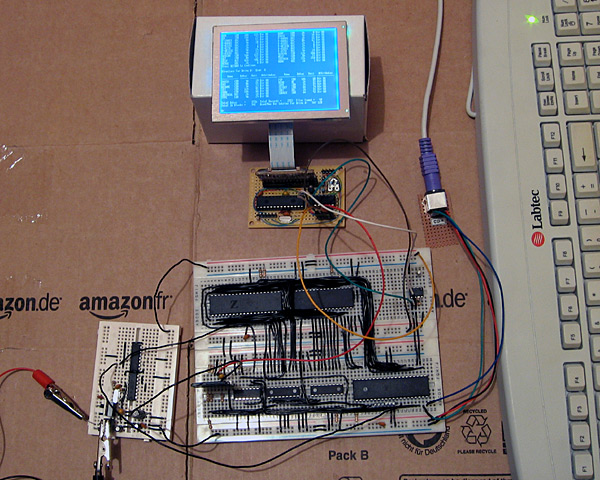
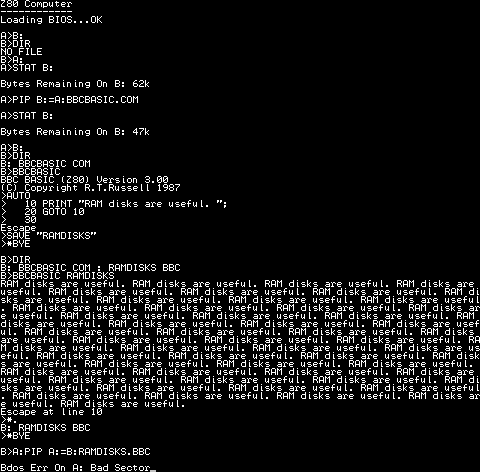
With the hardware installed, the AVR I/O controller updated to use it and the BIOS reprogrammed to expose it to CP/M it is possible to interact with other computers over the serial port. CP/M features five logical I/O devices: CONIN and CONOUT for general console input and output, AUXIN and AUXOUT for general "auxiliary" output and LST for printer output. The BIOS exposes two physical devices; CRT for the keyboard and video display controller and RS232 for the serial port. By using the DEVICE utility you can connect these logical and physical devices together. In the above screenshot I have connected the serial port to both CONIN and CONOUT. This allows me to connect my desktop PC to the Z80 computer using a null modem cable and use terminal emulation software (such as PuTTY) to talk to it.
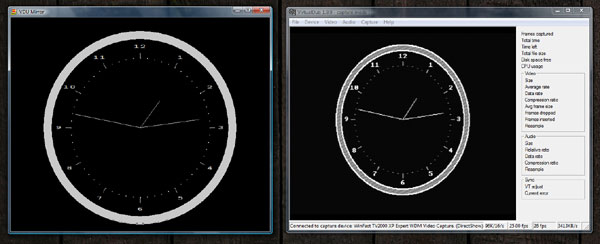
The above screenshot shows VirtualDub capturing the output of the video display controller next to an instance of BBC BASIC for Windows which is running the following program:
aux%=OPENIN("COM2: baud=9600 parity=N data=8 stop=1")
REPEAT
REPEAT:UNTIL EXT#aux%
VDU BGET#aux%
UNTIL.
This passes any data received over the serial port to the simulated VDU in BBC BASIC for Windows. As both video devices accept the same commands the result is that both show approximately the same thing.
I have been slightly improving the video display controller as I've gone along. One feature I had to add for the clock was the ability to draw text characters at the graphics cursor position, as opposed to the fixed text grid (this is used to draw the numbers around the dial). At the same time I added the ability to redefine the appearance of characters. One obvious use of this feature is to change the font, but when combined with the ability to render text anywhere on the screen some simple sprite-based games could be written for the computer. Each letter is just a 8×8 pixel sprite, after all.
Another feature I added was a simple implementation of MODE 2 where characters are stretched to sixteen pixels wide. You can't get much text on the screen in this mode but it may be useful for games.
A useful Z80 computer in a project box
Saturday, 14th August 2010
Work continues on the Z80 computer. The two final modifications to the box itself are the holes for the status LEDs and the power switch.

The green LED indicates power and the orange one disk activity. Unfortunately, the project box is fairly scratched on the outside (one scratch on the front is my own fault, but the sides and back were fairly scuffed and scratched when I bought it). If anyone has any tips for polishing scratches out of ABS I'd be glad to hear them; the usual household polishing abrasives (such as toothpaste) remove most of the light scuffs and result in a lovely mirror finish, but don't do anything to the deeper scratches. I'll probably invest in the finest grade wet-and-dry sandpaper I can find and have a go with that followed with a Brasso polish, and if that doesn't help (or makes it worse) just sand the whole thing down and paint it.
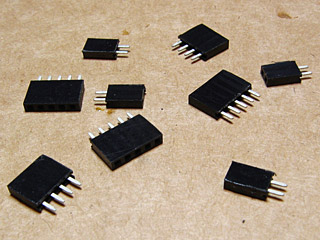
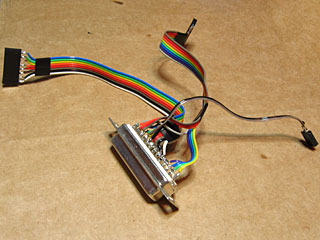
The circuit board inside the case needs to be attached to the case-mounted components somehow. In simpler projects I've resorted to soldering these connectors directly to the board, but this can make maintenance a problem (to remove the circuit board one would have to cut and resolder the wires). For this project I've left pin header strips on the board. The external connectors have leads soldered to them terminated with pin headers cut to size using some wire cutters and a rotary tool to polish them off; these headers are pictured above.
The main circuit board can then be easily installed or removed from the case as required. The small circuit board for the video display controller is connected to the main circuit board in the same way.
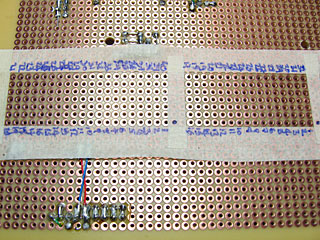
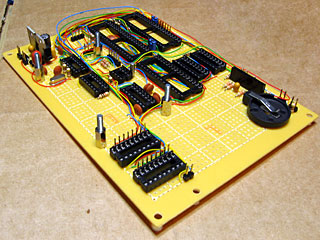
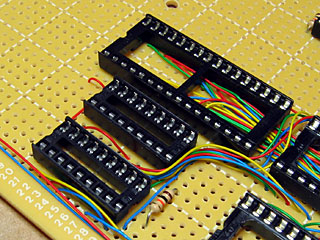
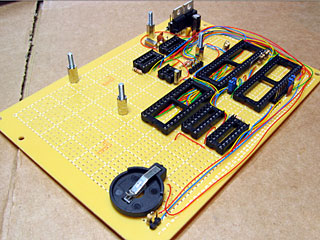
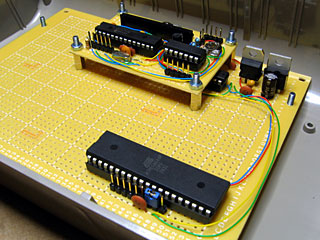
A Z80 computer can't live up to its name without some sort of a Z80 inside it, so I thought that that was the most obvious part to add next. Computers also generally need access to memory so I decided to add the 128KB SRAM chip at the same time. The Z80 communicates with the memory over an eight-bit data bus, a sixteen-bit address bus (to indicate which address in memory it is reading from or writing to) and a number of control lines (to indicate whether the current operation is a memory read or a memory write, for example). This provides a fairly tedious amount of soldering work; each pin on the memory needs to be connected to the corresponding pin on the Z80. To aid in the construction I stuck masking tape to the bottom of the perfboard around the outline of where the two chips would go and wrote the pin numbers onto the tape, shown in the photograph above.
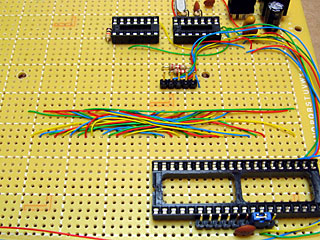
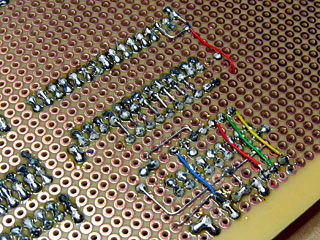
I put the two chips close together so I could put all of the bus wires on the inside of the IC holders rather than going around the outside. This saves a bit of space and avoids having to route the wires around the chip holders which gets a little untidy. The above photograph shows all of the wires in place before the chip holders were soldered in. Adding those in should be a quick and easy job, at least...
Well, you'd have thought so, but somehow I managed to solder in the 32-pin SRAM socket the wrong way around. Each socket has a notch to help you align the chip using its corresponding notch. As you can see in the above photo the notch points right when it should point left like all of the other sockets. It wouldn't affect the operation of the circuit (as long as the SRAM chip was inserted with the notch to the left) but it looks untidy and I may as well do the job properly.
On the positive side I suppose I got to practice my desoldering skills.
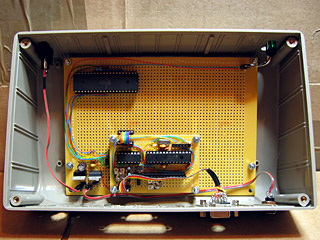
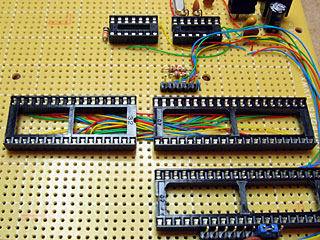
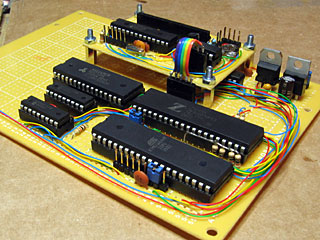
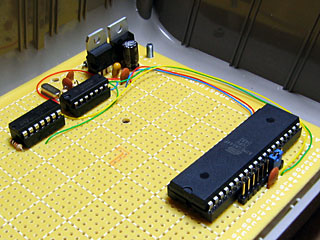
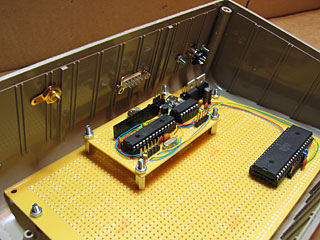
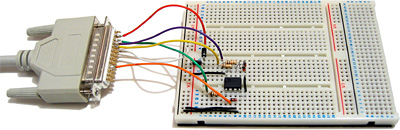
The computer design uses an AVR microcontroller to manage the I/O devices (such as the keyboard, video display controller and SD card) and to load the OS into the Z80's memory on reset. To achieve this the Z80 and the AVR need to be connected together. The above photograph shows some new wires between the AVR (bottom left) and Z80 (bottom middle) to connect the Z80's data bus to the AVR's PORTA and a number of other wires to connect the Z80's control lines to several other I/O pins on the AVR. A number of pull-up resistors have been added to control lines on the Z80 so that when nothing is driving the control bus they rise high (the de-asserted state). If left disconnected ("floating") the other components connected to the control bus may think these lines had gone low (asserted) and treat that as a read or write operation, corrupting data.
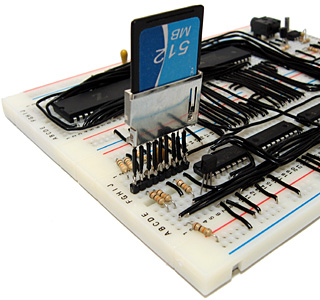
The AVR also needs to be connected to the Z80's address bus. This would take another sixteen pins if driven directly by the AVR; sixteen pins that aren't available to me! I am therefore using two MCP23S08 eight-bit I/O expanders, pictured above, to drive the address bus from the AVR. These are controlled over the SPI bus, which only takes up three pins on the AVR (these pins are shared with other SPI peripherals, such as the SD card) plus a single chip select pin that is unique to the I/O expanders. Four pins is better than sixteen, at any rate.
I keep mentioning chips even though the sockets are quite clearly empty in the above photographs. As I was approaching a useful computer circuit at this point I plugged all of the chips into their sockets to test the connections. As there was no SD card, real-time clock or keyboard I had to modify the boot loader on the AVR quite considerably; I started with a test program that wrote random data to blocks of memory then read them back to verify that they had written correctly. Once I had verified that the AVR was able to access memory correctly I reprogrammed it to copy a small Z80 program to memory and then let the Z80 take over. This Z80 program repeatedly output the string 'Z80' to the console output port. With everything plugged in I switched on the computer and saw the screen fill with Z80Z80Z80… so I was pretty certain that I'd wired everything up correctly!
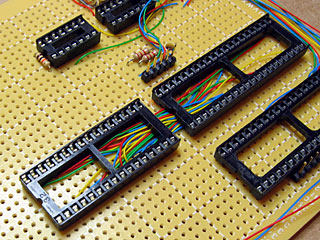
At this point I could start reintroducing the various peripherals to the computer. A DS1307 is used as a real-time clock. This clock needs to keep running when the computer is switched off, so I've added a 3V battery connector to the computer to keep it ticking.
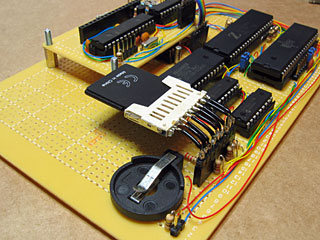
As the computer uses a 512MB SD card for storage, I have added a pin socket strip to the board to plug in the SD card slot I scavenged from a card reader. The card is connected to the SPI bus along with the I/O expanders used to drive the Z80 address bus. SD cards run at 3.3V rather than the 5V that nearly everything else on the board uses so I've used a series of voltage dividers to drop the voltage on each input pin from 5V to around 3V (the resistor values I have don't allow me to get to 3.3V; 3V is the closest I can manage without going over 3.3V). The video display controller board also runs on 3.3V so I do at least have a suitable voltage supply for the card!
The final part of the computer that was on the breadboard prototype but not yet in the final build was the keyboard connector. This is simply a four pin header on the board that is connected to the PS/2 port screwed to the case. However, when I tried to use the computer, the keyboard didn't appear to work. Pressing Num Lock, Caps Lock or Scroll Lock would toggle the associated LED and hitting Ctrl+Alt+Del would reboot the computer but no other key worked. This implied that the AVR was handling the keyboard correctly but the Z80 wasn't receiving any notification of key presses. A bit of digging identified the problem; I'd forgotten to connect the Z80's interrupt pin to the AVR! When a key is pressed the AVR triggers an interrupt to let the Z80 know that a key is available. By soldering a wire between the two chips it started working as intended.
The computer is now up to the same standard as it was when assembled on the breadboard, but is much more practical to work on. I hope to add a serial and parallel port to the computer soon, and would like to mount an LCD into the lid of the project box, but for the time being I am happy that I have managed to get this far.
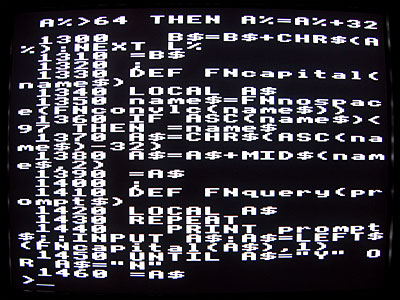
One of the advantages of running CP/M on the computer rather than my own operating system is the availability of existing software. The above photograph shows the computer running VEDIT, which is an excellent visual text editor.
With the hardware in a decent configuration I can start writing my own software. I think the first CP/M program I'll write is a graphical analogue clock, as this is the sort of program that can be left running for long periods as a way to check the stability of the computer.
Mounting circuit boards and rear panel connectors
Monday, 9th August 2010
One of the fun things about working with electronics is that you can end up with a physical product at the end of your hard work. To this end I have started moving my Z80 computer from its current breadboard to a more permanent enclosure.


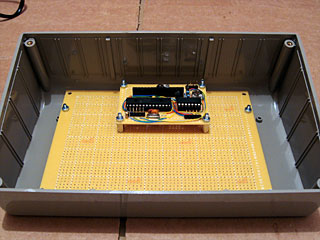
Large project boxes can be quite expensive (around £40, it seems), but the one I picked out was a slightly more reasonable £7. It's not the prettiest enclosure I've seen but it should be large enough to house the computer and provide space on the lid for the LCD and on the rear surface for a collection of connectors (as you'd expect to find on the rear of any computer).
The first challenge was how I intended to mount the circuit board within the box. The perfboard I will use for the main computer circuit doesn't fit the marked mounting posts on the bottom of the project box; it's too narrow and too deep. What the photo doesn't show very well is that the perfboard is not able to lie flat in the box due to the curve at the rear of the box. To raise the board above the bottom of the box I decided to use four PCB spacers, which required two new holes to be drilled into the perfboard away from its corners.

I decided that the video display controller, which resides on its own board, should be mounted on the main circuit board using PCB spacers too.
This required four more holes to be drilled into the main circuit board. I tried to align the small video display board so that its 16-way pin socket for connection to the LCD was as close to the horizontal centre as possible.

The base of the project box needed to have four holes drilled into it to support the main circuit board. Once the two nearest the front edge had been drilled, I screwed the circuit board to the back of the project box to mark the position for the other two holes to ensure that they lined up exactly with the holes drilled in the circuit board.
Screws come through the bottom of the project box to hold the main circuit board in place. Some sticky foam feet are provided with the project box which will raise it off the surface it is resting on to prevent these four screws from leaving scratches! Due to the curve at the back of the box the circuit board is only a few millimetres above its surface, which is why I reversed the screws holding the video display board to leave the long threaded ends pointing upwards.
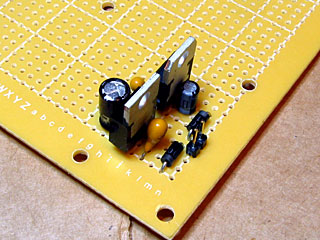
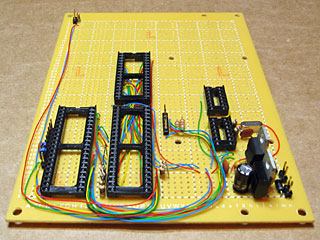
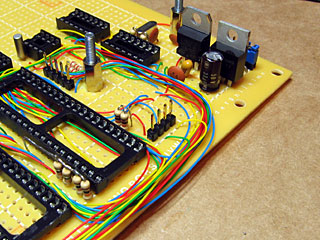
As working on the enclosure is a fairly noisy activity I switched my attention to the electronics for a brief spell. The first part of the circuit I assembled was the power supply; this just uses a pair of voltage regulators to provide 5V and 3.3V from an external power supply (I use a cheap wall wart affair rated at 7.5V DC).

I decided that the next part to tackle would be the oscillator. This uses a 20MHz crystal and a 74LS04 according to the design on z80.info to generate a 20MHz clock signal which will be further divided by two to produce a 10MHz clock signal for the Z80. I had some real problems with this design; it would run at 20MHz until I attached a load to it, at which point it would generate a fairly random-looking signal or stop oscillating entirely. I experimented with a few different capacitors and found that if I remove the 120pF capacitor and replace it with a 33pF capacitor on the other end of the crystal it works reliably. I'm not entirely sure why this is, but it's the design I've been using for a while with the computer on a breadboard so I'm happy to keep it this way for the time being.
I added a D flip-flop to divide the 20MHz clock to 10MHz and then added the ATmega644P microcontroller to the board. This has a jumper next to its clock input allowing for the selection of either 20MHz or 10MHz operation; a pin header to the left of this jumper allows for it to be programmed in-circuit.
With those new parts in place I reinstated the video display board to check that everything still fit. My main concern now was how far the connectors screwed into the rear of the case would intrude and whether there'd be any problems with them getting in the way of the circuit boards.
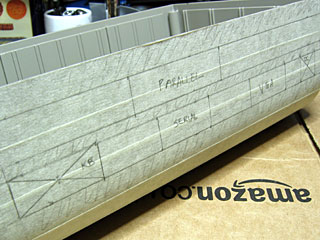
I sketched a design of how I saw the connectors would fit on the back of the case and then copied the layout to some masking tape stuck to the case. The computer naturally needs a power supply and keyboard input, and the video display board accounts for the VGA connector and an RCA connector for composite video (which I neglected to mark). I also hope to include a serial port and a parallel port in the final design (though neither are currently supported by the software) so left space for those two connectors.


The 6-way mini-DIN connector for the keyboard is the deepest one to contend with so I decided to start with it. I cut the hole in the case by drilling a small hole in the plastic which I then enlarged with a burr tool to the correct shape and size.

Fortunately it looks like there's plenty of room in the case for connectors!

The next few connectors confirm this. I really do not enjoy cutting the holes for D-sub connectors (such as the one for the serial port); they don't have much of a metal lip to hide a botched hole, so I have to cut very slowly and very carefully, taking a very long time to slowly enlarge each hole until the connector fits. I'm therefore not really sure why I decided to have three D-sub connectors in this computer design; maybe I'm just a glutton for punishment.


Finally, the rear of the case is completed. I will leave the masking tape on there as scratch protection until I have finished the front of the case (this will be significantly simpler — just a power switch, power LED and disk activity LED). Once that is done I can resume working on the electronics!
Integrating the dsPIC33 VDC with the Z80 computer
Saturday, 31st July 2010
The ultimate goal for the video display controller module I have been working on is to drive the display in my Z80 computer project. As I have now got a pretty good set of features I thought it would be a good idea to join the two projects together.
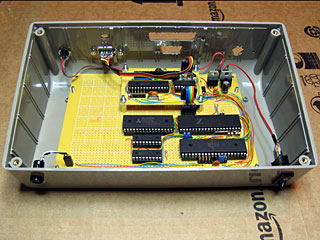
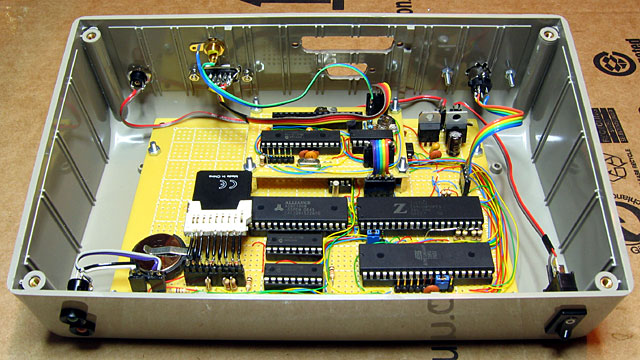
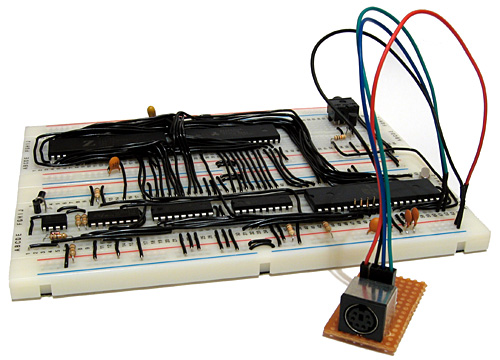
The big board in the lower middle of the above photograph is the main body of the computer, including the Z80, its RAM, the ATmega644P that is used to handle I/O, an SD card for storage and a DS1307 real-time clock. The small board in the bottom left of the photo is the power supply (supplying both 5V and 3.3V) and clock generator (providing a 20MHz and 10MHz clock).
At the top of the photo is the video display controller, connected to a 320×240 graphical LCD. A pin header is used to connect this VDC board to the rest of the computer. Three pins are required for power; 0V, 3.3V (dsPIC33 and output buffer) and 5V (LCD). The VDC is connected to the computer's ATmega644P I/O controller using the two-wire I2C bus (the same bus that is used to access the DS1307 clock). Rather than run a series of graphical demos, the VDC now waits for commands to be written to the I2C slave address 0xEE which it acts on to control what is shown on the screen. I'm aiming for these commands to work in the roughly same way as they did on the BBC Micro VDU, which should make porting the enhanced TI-83+ version of BBC BASIC to this computer a bit easier. The BBC Micro's VDU could be accessed by calling OSWRCH (assuming it was being used as the current output stream), which typically has an address of &FFEE — hence my choice of 0xEE as the I2C slave address!
A handful of these VDU commands have been implemented, which is sufficient to run simple CP/M software. The generic CP/M version of BBC BASIC does not, naturally, support any hardware-specific features and as such lacks advanced text or drawing support (one can send commands directly to the output stream with the VDU statement but this isn't very user-friendly). I will need to work on this now that the hardware is coming together! The current VDC code can be downloaded here if you are interested in the changes that have been made.
The above photo shows the newly constructed VDC hardware. All of my previous projects have been assembled on stripboard; as the projects have become more complex or simply smaller I've found stripboard to be increasingly awkward to work with. ICs can only really be orientated in one direction, and to reduce the size of circuits I've had to start cutting the tracks between holes (rather than the usual method which is to drill out an entire hole). The supplier I normally acquire parts from, Bitsbox, recently added three different sizes of perfboard to their catalogue so I thought I'd give it a go. I've found it much more pleasant to work with than stripboard, though not as easy to correct if you make a mistake and need to desolder a connection. You can certainly perform some interesting space-saving tricks on the underside of the board!
The Kynar insulation on the wire I switched to using also has the advantage of not melting when heated with a soldering iron, as I've had problems in previous projects where tightly-spaced wires will end up getting shorted together as the insulation between them melts.
I have mentioned that one pin header is used to connect the VDC to the computer. There are three others on the board; the two-pin one is for the composite video output, the six-pin one is for connection to a PICkit to reprogram the dsPIC and the four-pin one for the VGA output.
Now that I have moved the VDC onto a permanent circuit board I feel that I can start moving the rest of the computer in the same direction. The software is far from complete and the hardware is pretty rudimentary but it does basically work and having a more robust system to work on should make life a bit easier.
Booting CP/M 3 from an SD card
Wednesday, 23rd June 2010
Up to this point I have been running CP/M 2.2 on the Z80 computer. CP/M 3 adds a number of useful features, including the following:
- Support for more than 64KB RAM via banked memory.
- Standardised access to real-time clock for file date and time stamping.
- Improved text entry on the command-line when using the memory-banked version, such as the ability to move the cursor when editing and recall the previously entered line.
- Support for disks with physical sectors larger than the default record size of 128 bytes.
Switching to a banked memory system would require some new hardware in the form of a memory management unit so I have stuck with the simpler non-banked system for the time being. Support for physical disk sectors larger than 128 bytes is more interesting (SD cards use 512 byte "blocks") and real-time clocks are always useful so I have started working on updating to CP/M 3.
Z80 computer with new SD card slot (bottom left) and real-time clock (top right)
CP/M consists of three main pieces of software:
- A BIOS which exposes a small number of routines to perform primitive, hardware-specific operations (e.g. output a character to the console, read a raw sector from a disk, check if a key has been pressed).
- The BDOS which provides the main API for transient programs (e.g. read a complete line of input from the console, create a file, read a record from a file).
- The CCP, or console command processor, which provides the main user interface for loading and running other programs or performing some basic tasks via its built-in commands. This would be analogous to COMMAND.COM on DOS.
When working with CP/M 2.2 I had source files for these three pieces of software, so I just needed to implement the 17 BIOS functions, reassemble the three files to fixed addresses in memory and load them to these fixed addresses using the AVR when booting the computer. These three files were stored in the lower 8KB of the flash memory chip and were not accessible from within CP/M itself.
CP/M 3 proved to be a bit more of a challenge, as it is loaded slightly differently. The CCP is stored as a regular file named CCP.COM on the floppy disk you're booting from, so only the BIOS and BDOS need to be loaded from their hiding place at the start of the boot disk. These two pieces of software are merged into a single file named CPM3.SYS by a CP/M utility named GENCPM. To get this utility to work I needed to provide GENCPM with a hardware-specific BIOS3.SPR file that implemented the 31 BIOS routines. Fortunately, a file named BIOSKRNL.ASM is provided that implements most of the boilerplate code involved with writing a BIOS (you still have to provide the hardware-specific routines yourself, but your task is made much easier by following the template) so I just needed to recompile that for a non-banked system and link it with my handful of hardware-specific routines.
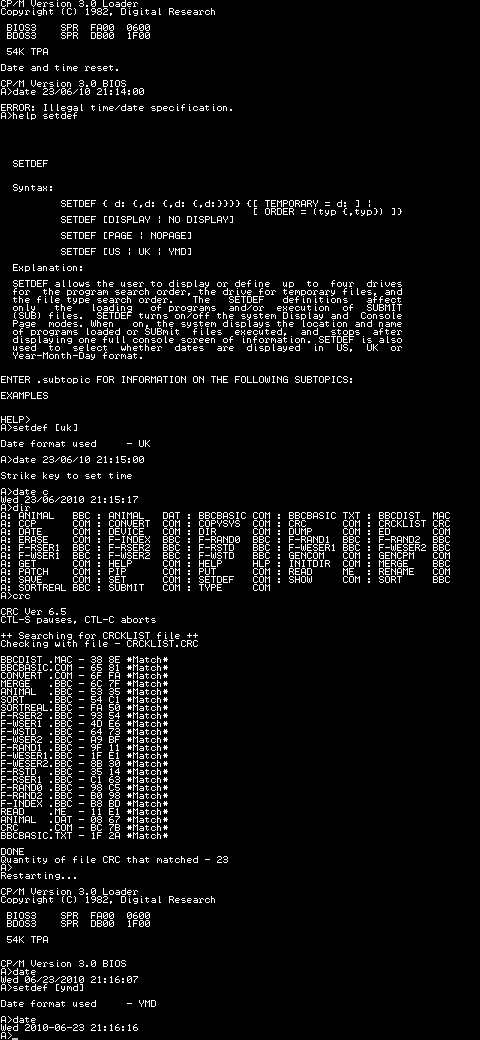
Ideally, CPM3.SYS would be stored on the regular file system with CCP.COM and the hidden boot loader would load CPM3.SYS for you. CP/M 3 does provide a small boot loader for this purpose (aptly named CPMLDR) which employs a cut-down BDOS and BIOS to load CPM3.SYS from the file system into memory for you. I haven't been able to get it to work, though, so I currently parse and load CPM3.SYS using some C code on the AVR. This works well enough for the time being, as can be seen in the above output generated by the computer when testing the real-time clock.
The time and date is maintained by a DS1307, an inexpensive eight-pin real-time clock and calendar chip that is shown in the middle of the above photograph. It is accessed over the I2C bus using a protocol that is natively supported by the AVR hardware. It uses binary-coded decimal to represent dates and times, which corresponds nicely to the time format used by CP/M; however, CP/M represents dates as a 16-bit integer counting the number of days since the 31st December 1977. I have used the algorithms on this website to convert dates to and from this format and the individual components.
The only downside of the DS1307 is that it only stores a two-digit year number, not the four digits one would hope for. This means that the century is discarded when setting the real-time clock, allowing for you to set a date that is then retrieved differently (truncated to the range 1930..2029). I haven't thought of a suitable solution to this problem just yet. I could use the AVR to act as the real-time clock, but I would then lose the advantage of the DS1307's battery backup that kicks in when the main power supply is removed.
The state of the DS1307 is effectively random at power-up. One of the first things the computer does when booting is to read the current date and time and check that all fields are within range. If not it resets them to midnight on the 1st January 1978 and displays a message to indicate that it has done so.
The SD card has been a bit of a headache to get working and though it currently only supports reading, not writing, it should hopefully be a useful addition to the computer. Rather than the previous arrangement of series rectifier diodes to drop the supply voltage and zener diodes to protect the inputs I'm using a dedicated 3.3V regulator to power the card and resistor voltage dividers to drop the 5V logic signals to around 3V (the closest I could get to 3.3V with the resistors I had to hand). I'm using the disk image from the old 512KB flash chip and treating the card as having 128 byte sectors so the arrangement is no more capable than before and in some cases quite a lot slower (reading a 128 byte record now entails reading a whole 512 byte block from the card then returning the desired 128 byte range within that block) but it seems to be as reliable as it used to be at least. SD cards append a CRC16 checksum when transferring data blocks so I can hopefully detect errors more easily and their on-board flash memory controller should perform wear-levelling, prolonging the life of the card.
To write the disk image to the card I used HxD which makes the job as easy as copy and paste. One problem I did have is that it displayed an "Access denied" error when attempting to write data, which I assume to be because something in Windows was using the card at the same time as HxD. I knocked together a short program for the AVR that wrote junk to the first block of the card, the result being that Windows no longer recognised the card's file system and HxD managed to write the data to the disk with no further problems.

Sockets for regular SD cards seem to be relatively expensive for what they are, but the above SD card reader cost a pound (what else?) from Poundland. A bit of work with a soldering iron and some desoldering tools yielded some useful components:

The crystal is unmarked and I'm hardly short of LEDs but the USB A connector could be a good way to reduce the size of a project that plugs into a USB port (USB B connectors are rather bulky) and the SD card slot works brilliantly for my needs here. There are cheaper and nastier ways to add an SD card slot to your project, but something like this feels more robust and has the advantage of reporting the state of the card's write protection switch.
Keyboard input and RAM disks make CP/M more useful
Wednesday, 16th June 2010
The hardware for the computer has changed in (mostly) subtle ways since the last post, with the exception of a PS/2 socket for connection to a keyboard.
PS/2 keyboards (which use the same protocol as the older AT keyboard) communicate with the host by clocking data in either direction (keyboard to host or host to keyboard) over two wires, appropriately named "clock" and "data". An AVR pin change interrupt is used to detect a change in state of the clock line and either input or output a bit on the data line depending on the current direction of data transmission. Incoming bytes generally relate to the scancode of the key that has just been pressed or released. These scancodes are looked up on a series of hard-coded tables to translate them into their corresponding ASCII characters. CP/M accesses the keyboard via two BIOS routines: CONST (2), which checks whether a character is available or not, and CONIN (3), which retrieves the character. I initially implemented these by simply reading from I/O port 2 (CONST) or port 3 (CONIN).
As keyboard input is polled, CP/M was wasting a lot of time reading from the AVR. Due to the AVR's relatively slow way to respond to I/O requests this was slowing down any program that needed to periodically call CONST (for example, BBC BASIC constantly checks for the Escape key when interpreting BASIC programs). I converted this polling system into an event driven one by connecting the AVR to the Z80's maskable interrupt pin, /INT. When a new key is received by the AVR it pulls /INT low to assert it. The Z80 responds to the interrupt request by setting an internal flag to remember that a key has been pressed and acknowledges the interrupt by outputting a value to port $38 (the Z80's maskable interrupt handler resides at a fixed address of $38 in memory, so this seemed like a sensible choice). The AVR detects this write to port $38 and returns /INT to its high state. The CONST routine can now directly return the value of this flag when polled (rather than having to request the flag from the AVR) which noticeably speeds up running programs. The flag is cleared when a key is read by calling CONIN.
I did have some difficulty getting the interrupt system to work; the Z80 has a number of different ways of responding to interrupts, two of which rely on fetching a value from the data bus by asserting /IORQ before an interrupt is serviced. IM 0 fetches an instruction from the bus and executes it, and IM 2 fetches the least significant byte of the address of the interrupt service routine to combine with the most significant byte stored in the I register. IM 1 (which is what I'm using) just jumps to the fixed address $38. However, I hadn't taken this additional data read into account and when the Z80 attempted to read from an I/O device the AVR was either putting nonsense on the bus or (deliberately) locking up with a message to indicate an unsupported operation. Fortunately you can easily tell the difference between a regular I/O request and an interrupt data request by checking the Z80's /M1 output pin, so with that addition things started working a bit more smoothly!
I'm still using terminal emulation software on my PC to view the output of the computer, though as I now have keyboard entry the results are a little more impressive than the few boot report lines and a prompt that were in the last entry. I still haven't worked out why my PC switches off or blue-screens when programming AVRs over the serial port, so I've soldered together a parallel port programmer for the time being.
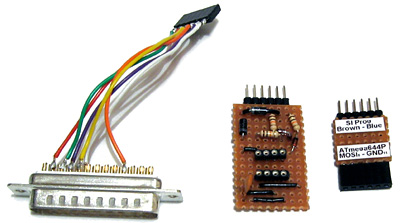
The pinout of the programmer matches that of the website where I found the SI Prog design. The ATmega644P's SPI, power and reset pins that the programmer interfaces with are all adjacent, but not in the same order as the ones in the SI Prog, hence the small board to the right of the above photo which swaps the pin order around using wires soldered to its reverse (this saves a lot of breadboard space). The board in the middle plugs directly into the parallel port programmer and is used to program the 512KB flash memory chip I'm using for storage.
I haven't got around to implementing writing to this flash memory yet, unfortunately, though I have implemented a simple way to test a writable disk drive. The RAM chip I am using is a 128KB one, as Farnell didn't sell 64KB ones. The Z80 can only address 64KB without additional memory banking hardware, so I'd simply tied A16 low and was ignoring half of the memory. I have now edited the BIOS to expose two disk drives; the default A: (512KB of flash memory) and now B:, a 64KB RAM drive. A16 is now driven by the AVR; during normal operation, it is held low (giving the Z80 access to its usual 64KB) but during disk operations it can be driven high to grant the AVR access to the previously hidden storage.
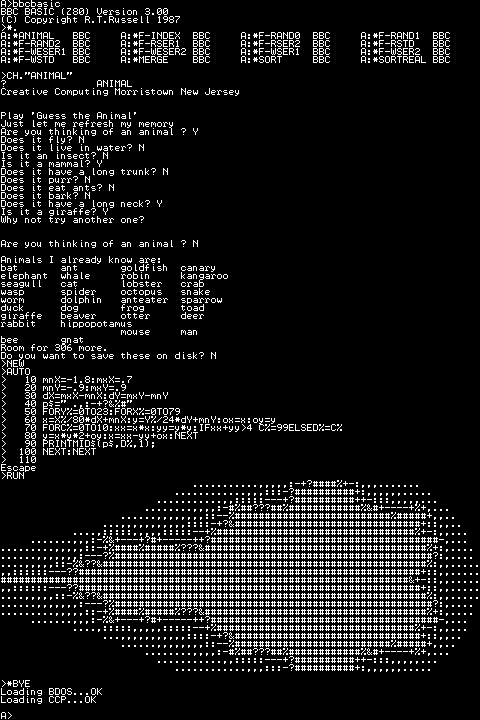
In the above test I use the STAT command to check free space, the PIP command to copy BBCBASIC.COM from A: (flash) to B: (RAM) then run BBC BASIC from the RAM disk, save a program then run it again by passing its filename as a command-line argument to BBC BASIC. At the end I try to copy the new program back to A:, but as there is no writing support for flash it keels over with a fairly unhelpful generic CP/M error.
Now that I've finally got something working in a vaguely usable manner, I hope I can start to research ways to make it better. Sorting out writing to flash would be a good start (I'm sorely tempted by jbb's suggestion to use an EEPROM to map logical floppy sectors to physical flash sectors) and I certainly hope to dig out my 320×240 pixel graphical LCD and driver for output instead of relying on a desktop PC. I'd also like to upgrade to CP/M 3 (I'm currently using CP/M 2.2) but when I last looked at that it seemed like a much more involved process so I decided to keep it simple. There's a fair mountain of stuff I need to take in, but I'm certainly learning a lot as I go (I only just realised tonight that CP/M was capable of graphics output, for one). I'd be a very happy chap if I could eventually run WordStar on this computer!
Combining a Z80 and an ATmega644P to boot CP/M
Monday, 14th June 2010
I've been working on a new Z80 computer over the last few days. I would say that I had been working on the existing Z80 computer were it not for the fact that this a completely new design.
The previous computer had two 32KB RAM chips to provide a total of 64KB RAM. To run a user program you need to get it into RAM somehow, so I also included a 128KB ROM chip which occupied the lower 16KB of the Z80's address space to provide the fixed operating system that could be used to load programs. By adding memory banking hardware I could select one of eight 16KB pages of ROM. The next 16KB was one of two banks of RAM from one RAM chip, and the final 32KB was mapped directly to the other RAM chip.
This is all fairly complicated, and not very flexible. Programs written for CP/M tend to be loaded into memory starting at address $0100, which is impossible with my old design as that section of memory is taken up by ROM.
Giving another device access to the buses
The Z80 accesses memory and other hardware devices using three buses; an eight-bit data bus which shuttles bytes of data between the various chips, a sixteen-bit address bus which addresses a location in memory or a particular I/O device, and a control bus which contains numerous lines that specify the type of operation (for example, if /MREQ and /WR go low together it indicates that a byte is being written to memory, or if /IORQ and /RD go low together it indicates that a byte is being read from an I/O device).
There is also a pin named /BUSREQ that can be used to request access to these buses. The Z80 will periodically check this pin and if it is held low it will put the data, address and control buses into a high-impedance state and drive /BUSACK low to acknowledge this. This effectively removes the Z80 from the circuit, and another device can now drive the buses.
;if(img.style.backgroundImage){img.style.backgroundImage='url('+img.src+')';img.src=imgs[img.src.indexOf(imgs[1])<0?1:2]}else{img.style.backgroundImage='url('+img.src+')';img.src=imgs[2];};void(0);)
This is the feature which I have based the new design around — the current prototype is pictured above. It features a Z80 and 128KB of SRAM (only 64KB is currently addressable) on the upper board. On the lower board is an ATmega644P microcontroller, which is used to start the computer.
When the circuit is reset, the ATmega644P requests access to the buses from the Z80. When access has been granted, it proceeds to copy the CP/M BIOS from the 512KB flash memory IC to a specific location in RAM (currently $F200). It then writes the Z80 jump instruction jp $F200 to the start of memory, returns control of the buses to the Z80 and pulses its /RESET pin. The CP/M BIOS then runs directly on the Z80.
As the ATmega644P doesn't have enough pins to drive all of the buses directly, I've added sixteen GPIO pins by using two MCP23S08 8-bit I/O expander chips. These are used to drive or sample the Z80 address bus; the data and control buses are driven or sampled directly by the GPIO ports on the ATmega644P.
Using a slow to respond microcontroller for I/O
The Z80 is most useful if it can talk to the outside world somehow, which is usually achieved by reading from or writing to I/O devices. In my previous design I built these out of latches and lots of glue logic. As I've added a powerful microcontroller to the computer which features a number of useful on-board peripherals, it would seem sensible to use that instead.
One problem with this idea is that the Z80 expects to read or write to an I/O device in a mere four clock cycles. The AVR has a delay between an interrupt occurring (such as a pin state changing) and executing interrupt service routine of at least five clock cycles. Even though the AVR is running at twice the clock speed of the Z80 this still doesn't provide much time to sample the address bus and perform some useful action before returning a value to the Z80. Fortunately, the Z80 has another useful pin, /WAIT, specifically to address this concern. By pulling this pin low the Z80 can be stalled, allowing the I/O device plenty of time to respond. I have included a 7474 D-type flip-flop as an SR latch to control the /WAIT pin. When the Z80's /IORQ pin goes low the flip-flop is reset, which pulls the /WAIT pin low. When the AVR notices that the /IORQ line has gone low it samples the address bus, performs the requisite task then sets the flip-flop, which drives the /WAIT pin high again and the Z80 continues executing the program.
The 7474 is a dual D-type flip-flop, so I have used the second flip-flop to halve the AVR's 20MHz clock signal to provide the 10MHz clock for the Z80.
CP/M interacts with the host computer by calling numbered BIOS functions. I have implemented a number of these BIOS functions by outputting a value to a port number that matches the BIOS function number. For example, CONOUT is function number four and is used to send the character in register C to the console.
CONOUT:
ld a,c
out (4),a
ret
The AVR detects a write to port 4 and sends the incoming byte to one of its UARTs. I have connected this UART to a simple transistor inverter (pictured in the top right of the above photograph) and plugged the output from that into one of my PC's serial ports, so by running a terminal emulator I can see the output of CP/M on the screen. I have implemented only a handful of other functions (WBOOT outputs a value to port 1 to indicate that I should load the BDOS and CCP into RAM from the flash memory and READ can be used to copy 128 byte floppy disk sectors from flash memory to Z80 RAM) so the results are not exactly impressive:
Loading BIOS...OK Loading BDOS...OK Loading CCP...OK A>
As I haven't implemented console input yet there's no way to type at the prompt, but that it gets that far is encouraging.
I haven't implemented writing to the flash memory due to a mistake I made when reading its datasheet. When writing to flash memory the value you write is ANDed with the data that's already there (you can only set a 1 bit to a 0 bit, but not vice-versa) – this is referred to as programming. If you want to write a 1 bit you have to erase the memory before writing to it (this is unsurprisingly referred to as erasing). Flash memory can be split into pages (small regions, in this case 256 bytes) and sectors (large regions, in this case 64KB). You can often program any number of bytes (up to a page at a time, aligned to page boundaries) but can only erase in larger blocks — pages, sectors, or the entire memory (bulk erase). I thought that the flash memory ICs I bought supported page erasing, but they only support sector erasing. CP/M transfers data between floppy disks and RAM in 128 byte floppy disk sectors, so to write an updated sector I would need to read 64KB from the flash memory, update a 128 byte region within it, erase an entire flash sector, then program the 64KB back to it. This would be very slow and quickly wear out the flash memory, so I am looking for some replacement flash memory ICs which do support page erase.
To copy the system files and a sample disk image to the flash memory I cobbled together the above parallel port programmer which is driven by an application cobbled together in C#. It's rather slow but gets the job done — unlike my AVR programmer. After finally managing to get CP/M to boot in a satisfactory manner I made a few tweaks to the AVR program and hit the "Build and Program" button in the editor. The code built, but rather than program the AVR my computer switched off. No error message, not even a blue screen, just a sudden and surprising power down. Since then I've only managed to talk to the AVR once; every other time has resulted in either a power down or blue screen. I had hoped to add some keyboard handling routines to the project to at least be able to interact with CP/M, but after fiddling around for an hour and a half without managing to get anything working again I gave up. I wish I knew why it suddenly stopped working, after hours of reliable service — maybe it's a hint that it's time to buy a proper USB debugger rather than the cheap and cheerful home-made serial port programmer I've been using!
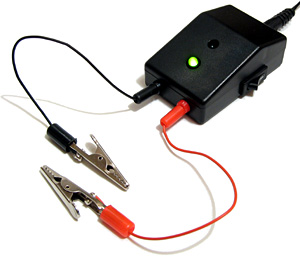
One equally cheap but useful addition to my tools is the above 5V power supply (yes, it's just a 7805 regulator in a box). Every project I have built needs a 5V supply from somewhere, which usually comes from a 7.5V wall wart power supply unit regulated to 5V with a 7805. This takes up valuable breadboard space and the weight of the cable from the power supply tends to drag the breadboard around the smooth surface of my desk, so having a dedicated box with an on-off switch, indicator LED, reverse voltage protection and an easy way to connect to the circuit via 2mm sockets is very handy indeed.
I now need to find a way to program AVRs without my PC switching itself off before I can make any more progress on the project...
Thinking about CP/M
Wednesday, 24th February 2010
It's been some time since I worked on my Z80 computer project, but the recent electronics projects I've completed have got me thinking about it again.
I did record a video to demonstrate the basic parts of the computer and some of its flaws a few months ago, which can be seen above. However, I'm now thinking of a more radical redesign than fixing the I/O board's shortcomings.
One of the reasons for my lack of motivation is that even if I did get something working I wouldn't have much software to run on it; it would be a lot of work to write software that only ran on that one particular machine. BBC BASIC helps somewhat, but an even better solution would be to model the device on an existing machine and run its operating system on it.
Fortunately, there was a popular operating system for the 8080 (and, by extension, the Z80) – CP/M. This is a very simple operating system that inspired DOS. Crucially, it is not hardware-specific, the source code is available and there is a wide range of software available for it, including BBC BASIC.
CP/M is made up of three main components. At the highest level is the Console Command Processor, or CCP. This provides the command-line interface, a handful of built-in commands and handles loading and executing external programs. It achieves this with the aid of the Basic Disk Operating System, or BDOS, which exposes a number of useful routines for a variety of tasks, such as outputting text to the display, searching for files on the disk or reading console input.
Both of the above components are machine-independent – they simply need to be copied to the correct address in RAM when the computer starts. Relocating them to a particular address requires setting a single value in their respective source files and reassembling them, which is nice and easy. It's the third component – the Basic I/O System, or BIOS – that requires a bit more work. This is the only part that is tailored to a particular machine's hardware, and my current implementation is listed below.
CCP = $DC00 BDOS = $E406 BIOS = $F200 IOBYTE = $0003 CDISK = $0004 DMAAD = $0008 CTRACK = $000A CSEC = $000C .org BIOS jp BOOT ; COLD START WBOOTE jp WBOOT ; WARM START jp CONST ; CONSOLE STATUS jp CONIN ; CONSOLE CHARACTER IN jp CONOUT ; CONSOLE CHARACTER OUT jp LIST ; LIST CHARACTER OUT jp PUNCH ; PUNCH CHARACTER OUT jp READER ; READER CHARACTER OUT jp HOME ; MOVE HEAD TO HOME POSITION jp SELDSK ; SELECT DISK jp SETTRK ; SET TRACK NUMBER jp SETSEC ; SET SECTOR NUMBER jp SETDMA ; SET DMA ADDRESS jp READ ; READ DISK jp WRITE ; WRITE DISK jp LISTST ; RETURN LIST STATUS jp SECTRAN ; SECTOR TRANSLATE DISKPARAM .dw $0000 ; No sector translation. .dw $0000 ; Scratch .dw $0000 ; Scratch .dw $0000 ; Scratch .dw DIRBUF ; Address of a 128-byte scratch pad area for directory operations within BDOS. All DPHs address the same scratch pad area. .dw DPBLK ; Address of a disk parameter block for this drive. Drives with identical disk characteristics address the same disk parameter block. .dw CHK00 ; Address of a scratch pad area used for software check for changed disks. This address is different for each DPH. .dw ALL00 ; Address of a scratch pad area used by the BDOS to keep disk storage allocation information. This address is different for each DPH. DIRBUF .fill 128 DPBLK ; DISK PARAMETER BLOCK, COMMON TO ALL DISKS .DW 26 ; SECTORS PER TRACK .DB 3 ; BLOCK SHIFT FACTOR .DB 7 ; BLOCK MASK .DB 0 ; NULL MASK .DW 242 ; DISK SIZE-1 .DW 63 ; DIRECTORY MAX .DB 192 ; ALLOC 0 .DB 0 ; ALLOC 1 .DW 16 ; CHECK SIZE .DW 2 ; TRACK OFFSET CHK00 .fill 16 ALL00 .fill 31 ; =========================================================================== ; ; BOOT ; ; =========================================================================== ; ; The BOOT entry point gets control from the cold start loader and is ; ; responsible for basic system initialization, including sending a sign-on ; ; message, which can be omitted in the first version. ; ; If the IOBYTE function is implemented, it must be set at this point. ; ; The various system parameters that are set by the WBOOT entry point must be ; ; initialized, and control is transferred to the CCP at 3400 + b for further ; ; processing. Note that register C must be set to zero to select drive A. ; ; =========================================================================== ; BOOT xor a ld (IOBYTE),a ld (CDISK),a jp GOCPM ; =========================================================================== ; ; WBOOT ; ; =========================================================================== ; ; The WBOOT entry point gets control when a warm start occurs. ; ; A warm start is performed whenever a user program branches to location ; ; 0000H, or when the CPU is reset from the front panel. The CP/M system must ; ; be loaded from the first two tracks of drive A up to, but not including, ; ; the BIOS, or CBIOS, if the user has completed the patch. System parameters ; ; must be initialized as follows: ; ; ; ; location 0,1,2 ; ; Set to JMP WBOOT for warm starts (000H: JMP 4A03H + b) ; ; ; ; location 3 ; ; Set initial value of IOBYTE, if implemented in the CBIOS ; ; ; ; location 4 ; ; High nibble = current user number, low nibble = current drive ; ; ; ; location 5,6,7 ; ; Set to JMP BDOS, which is the primary entry point to CP/M for transient ; ; programs. (0005H: JMP 3C06H + b) ; ; ; ; Refer to Section 6.9 for complete details of page zero use. Upon completion ; ; of the initialization, the WBOOT program must branch to the CCP at 3400H+b ; ; to restart the system. ; ; Upon entry to the CCP, register C is set to thedrive;to select after system ; ; initialization. The WBOOT routine should read location 4 in memory, verify ; ; that is a legal drive, and pass it to the CCP in register C. ; ; =========================================================================== ; WBOOT GOCPM ld a,$C3 ; C3 IS A JMP INSTRUCTION ld ($0000),a ; FOR JMP TO WBOOT ld hl,WBOOTE ; WBOOT ENTRY POINT ld ($0001),hl ; SET ADDRESS FIELD FOR JMP AT 0 ld ($0005),a ; FOR JMP TO BDOS ld hl,BDOS ; BDOS ENTRY POINT ld ($0006),hl ; ADDRESS FIELD OF JUMP AT 5 TO BDOS ld bc,$0080 ; DEFAULT DMA ADDRESS IS 80H call SETDMA ei ; ENABLE THE INTERRUPT SYSTEM ld a,(CDISK) ; GET CURRENT DISK NUMBER ld c,a ; SEND TO THE CCP jp CCP ; GO TO CP/M FOR FURTHER PROCESSING ; =========================================================================== ; ; CONST ; ; =========================================================================== ; ; You should sample the status of the currently assigned console device and ; ; return 0FFH in register A if a character is ready to read and 00H in ; ; register A if no console characters are ready. ; ; =========================================================================== ; CONST out (2),a \ ret ; =========================================================================== ; ; CONIN ; ; =========================================================================== ; ; The next console character is read into register A, and the parity bit is ; ; set, high-order bit, to zero. If no console character is ready, wait until ; ; a character is typed before returning. ; ; =========================================================================== ; CONIN out (3),a \ ret ; =========================================================================== ; ; CONOUT ; ; =========================================================================== ; ; The character is sent from register C to the console output device. ; ; The character is in ASCII, with high-order parity bit set to zero. You ; ; might want to include a time-out on a line-feed or carriage return, if the ; ; console device requires some time interval at the end of the line (such as ; ; a TI Silent 700 terminal). You can filter out control characters that cause ; ; the console device to react in a strange way (CTRL-Z causes the Lear- ; ; Siegler terminal to clear the screen, for example). ; ; =========================================================================== ; CONOUT out (4),a \ ret ; =========================================================================== ; ; LIST ; ; =========================================================================== ; ; The character is sent from register C to the currently assigned listing ; ; device. The character is in ASCII with zero parity bit. ; ; =========================================================================== ; LIST out (5),a \ ret ; =========================================================================== ; ; PUNCH ; ; =========================================================================== ; ; The character is sent from register C to the currently assigned punch ; ; device. The character is in ASCII with zero parity. ; ; =========================================================================== ; PUNCH out (6),a \ ret ; =========================================================================== ; ; READER ; ; =========================================================================== ; ; The next character is read from the currently assigned reader device into ; ; register A with zero parity (high-order bit must be zero); an end-of-file ; ; condition is reported by returning an ASCII CTRL-Z(1AH). ; ; =========================================================================== ; READER out (7),a \ ret ; =========================================================================== ; ; HOME ; ; =========================================================================== ; ; The disk head of the currently selected disk (initially disk A) is moved to ; ; the track 00 position. If the controller allows access to the track 0 flag ; ; from the drive, the head is stepped until the track 0 flag is detected. If ; ; the controller does not support this feature, the HOME call is translated ; ; into a call to SETTRK with a parameter of 0. ; ; =========================================================================== ; HOME ld bc,0 jp SETTRK ; =========================================================================== ; ; SELDSK ; ; =========================================================================== ; ; The disk drive given by register C is selected for further operations, ; ; where register C contains 0 for drive A, 1 for drive B, and so on up to 15 ; ; for drive P (the standard CP/M distribution version supports four drives). ; ; On each disk select, SELDSK must return in HL the base address of a 16-byte ; ; area, called the Disk Parameter Header, described in Section 6.10. ; ; For standard floppy disk drives, the contents of the header and associated ; ; tables do not change; thus, the program segment included in the sample ; ; CBIOS performs this operation automatically. ; ; ; ; If there is an attempt to select a nonexistent drive, SELDSK returns ; ; HL = 0000H as an error indicator. Although SELDSK must return the header ; ; address on each call, it is advisable to postpone the physical disk select ; ; operation until an I/O function (seek, read, or write) is actually ; ; performed, because disk selects often occur without ultimately performing ; ; any disk I/O, and many controllers unload the head of the current disk ; ; before selecting the new drive. This causes an excessive amount of noise ; ; and disk wear. The least significant bit of register E is zero if this is ; ; the first occurrence of the drive select since the last cold or warm start. ; ; =========================================================================== ; SELDSK ld hl,DISKPARAM ld a,c or a ret z ld hl,$0000 ; Only disc 0 is supported. ret ; =========================================================================== ; ; SETTRK ; ; =========================================================================== ; ; Register BC contains the track number for subsequent disk accesses on the ; ; currently selected drive. The sector number in BC is the same as the number ; ; returned from the SECTRAN entry point. You can choose to seek the selected ; ; track at this time or delay the seek until the next read or write actually ; ; occurs. Register BC can take on values in the range 0-76 corresponding to ; ; valid track numbers for standard floppy disk drives and 0-65535 for ; ; nonstandard disk subsystems. ; ; =========================================================================== ; SETTRK ld (CTRACK),bc ret ; =========================================================================== ; ; SETSEC ; ; =========================================================================== ; ; Register BC contains the sector number, 1 through 26, for subsequent disk ; ; accesses on the currently selected drive. The sector number in BC is the ; ; same as the number returned from the SECTRAN entry point. You can choose to ; ; send this information to the controller at this point or delay sector ; ; selection until a read or write operation occurs. ; ; =========================================================================== ; SETSEC ld (CSEC),bc ret ; =========================================================================== ; ; SETDMA ; ; =========================================================================== ; ; Register BC contains the DMA (Disk Memory Access) address for subsequent ; ; read or write operations. For example, if B = 00H and C = 80H when SETDMA ; ; is called, all subsequent read operations read their data into 80H through ; ; 0FFH and all subsequent write operations get their data from 80H through ; ; 0FFH, until the next call to SETDMA occurs. The initial DMA address is ; ; assumed to be 80H. The controller need not actually support Direct Memory ; ; Access. If, for example, all data transfers are through I/O ports, the ; ; CBIOS that is constructed uses the 128 byte area starting at the selected ; ; DMA address for the memory buffer during the subsequent read or write ; ; operations. ; ; =========================================================================== ; SETDMA ld (DMAAD),bc ret ; =========================================================================== ; ; READ ; ; =========================================================================== ; ; Assuming the drive has been selected, the track has been set, and the DMA ; ; address has been specified, the READ subroutine attempts to read one sector ; ; based upon these parameters and returns the following error codes in ; ; register A: ; ; ; ; 0 - no errors occurred ; ; 1 - nonrecoverable error condition occurred ; ; ; ; Currently, CP/M responds only to a zero or nonzero value as the return ; ; code. That is, if the value in register A is 0, CP/M assumes that the disk ; ; operation was completed properly. If an error occurs the CBIOS should ; ; attempt at least 10 retries to see if the error is recoverable. When an ; ; error is reported the BDOS prints the message BDOS ERR ON x: BAD SECTOR. ; ; The operator then has the option of pressing a carriage return to ignore ; ; the error, or CTRL-C to abort. ; ; =========================================================================== ; READ out (13),a \ ret ; =========================================================================== ; ; WRITE ; ; =========================================================================== ; ; Data is written from the currently selected DMA address to the currently ; ; selected drive, track, and sector. For floppy disks, the data should be ; ; marked as nondeleted data to maintain compatibility with other CP/M ; ; systems. The error codes given in the READ command are returned in register ; ; A, with error recovery attempts as described above. ; ; =========================================================================== ; WRITE out (14),a \ ret ; =========================================================================== ; ; LISTST ; ; =========================================================================== ; ; You return the ready status of the list device used by the DESPOOL program ; ; to improve console response during its operation. The value 00 is returned ; ; in A if the list device is not ready to accept a character and 0FFH if a ; ; character can be sent to the printer. A 00 value should be returned if LIST ; ; status is not implemented. ; ; =========================================================================== ; LISTST out (15),a \ ret ; =========================================================================== ; ; SECTRAN ; ; =========================================================================== ; ; Logical-to-physical sector translation is performed to improve the overall ; ; response of CP/M. Standard CP/M systems are shipped with a skew factor of ; ; 6, where six physical sectors are skipped between each logical read ; ; operation. This skew factor allows enough time between sectors for most ; ; programs to load their buffers without missing the next sector. In ; ; particular computer systems that use fast processors, memory, and disk ; ; subsystems, the skew factor might be changed to improve overall response. ; ; However, the user should maintain a single-density IBM-compatible version ; ; of CP/M for information transfer into and out of the computer system, using ; ; a skew factor of 6. ; ; ; ; In general, SECTRAN receives a logical sector number relative to zero in BC ; ; and a translate table address in DE. The sector number is used as an index ; ; into the translate table, with the resulting physical sector number in HL. ; ; For standard systems, the table and indexing code is provided in the CBIOS ; ; and need not be changed. ; ; =========================================================================== ; SECTRAN ld h,b ld l,c ret
Quite a number of the above routines simply output the value of the accumulator to a port. This is because I'm running CP/M in a Z80 emulator that I've knocked together, and am handling writes to particular ports by implementing the machine-specific operations (such as console input or output) in C#. The floppy disk file system is also emulated in C#; when the program starts, it pulls all the files from a specified directory into an in-memory disk image. Writing to any sector deletes all of the files in this directory then extracts the files from the in-memory virtual disk image back into it. This is not especially efficient, but it works rather well.
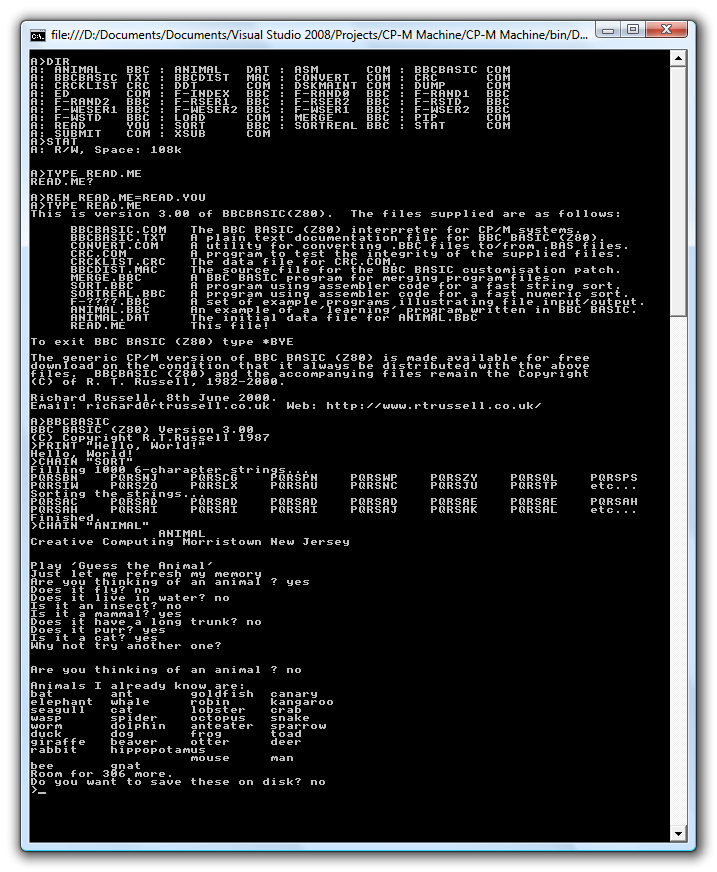
To turn this into a working bit of hardware, I intend to replace the C# part with a microcontroller to handle keyboard input, text output and interfacing to an SD card for file storage. It would also be responsible for booting the system by copying the OS to Z80 memory from the SD card. I'm not sure the best way to connect the microcontroller to the Z80, though; disk operations use DMA, which is easy enough, but for lighter tasks such as querying whether console input is available or outputting a character to the display it would be nice to be able to go via I/O ports. A couple of I/O registers may be sufficient as per the current design; a proper Z80 PIO would be even better if I can get my hands on one.
Of more concern is a suitable display; the above screenshot is from an 80-character wide display. Assuming a character was four pixels wide (which is about as narrow as they can be made whilst still being legible) imposes a minimum resolution of 320 pixels horizontally – my current LCD is only 128 pixels wide (not even half way there), and larger ones are really rather expensive!
Decoding SIRCS commands with a PIC16F84
Sunday, 1st March 2009
Some time ago I was working on a simple Z80-based computer. It has a PS/2 keyboard and mouse port for user input, and these are implemented using a large number of discrete parts - transistor drivers with all manner of supporting latches and buffers. The AT protocol (which the PS/2 keyboard and mouse inherit) is entirely implemented in software by the Z80.
On the one hand this design has a certain purity, but it ties the CPU up every time data is to be transferred. The keyboard sends data when it feels like it, so if you wished to perform some function based on a key press event you'd need to poll the port periodically, assuming that if communications time out there's no key waiting. All this hanging around does nothing good for performance.
As it turns out I found a PIC16F84 in an old school project over the weekend, so downloaded its datasheet and the MPLAB IDE and tried to puzzle it out.
The 16F84 is a pretty venerable microcontroller with a 1K flash memory for program code, 68 bytes of data RAM and 64 bytes of data EEPROM. It can run at up to 10MHz, and is based on a high-performance RISC CPU design. It has 13 digital I/O pins, each of which can be configured individually as either an input or an output. I'm well aware there are far better microcontrollers around these days, but this one was just sitting around doing nothing.
;if(img.style.backgroundImage){img.style.backgroundImage='url('+img.src+')';img.src=imgs[img.src.indexOf(imgs[1])<0?1:2]}else{img.style.backgroundImage='url('+img.src+')';img.src=imgs[2];};void(0);)
Above is the circuit I constructed to work with the 16F84. The HRM538BB5100 in the top-right is an infrared demodulator and amplifier module; it will output 5V until it receives a 38kHz infrared signal (such as the one emitted by most remote controls) at which point it outputs 0V. By timing the lengths of the IR pulses one could decode a remote control signal, and that's the aim of this project - decode a command from a Sony remote control and display it on the two 7-segment displays. The 10MHz crystal is probably overkill for this simple task, but it's the slowest I had available!
In fact, the 10MHz crystal works out quite neatly. Most instructions execute in one instruction cycle, which is four clock cycles. Four clock cycles at 10MHz is 400nS. The 16F84 has an internal timer that counts up after every instruction cycle and triggers an interrupt when it overflows from 255 back to 0; 400nS*256=102.4µs. If we call that 100µs (close enough for jazz) then it overflows 10 times every millisecond. The SIRCS protocol is based around multiples of 0.6ms, which makes this rate very easy to work with.
; ========================================================================== ; ; Pins: ; ; RB0~RB6: Connected to A~G on the two seven-segment displays. ; ; RB7: Connected via a 220R resistor to cathode of the left display. ; ; Inverted and connected via a 220R resistor to right display's ; ; cathode. ; ; RA0: Connected to the output of the HRM538BB5100. ; ; ========================================================================== ; #include <p16F84.inc> list p=16F84 __CONFIG _CP_OFF & _WDT_OFF & _PWRTE_ON & _HS_OSC ; ========================================================================== ; ; Variables ; ; ========================================================================== ; udata IsrW res 1 ; Temporary storage used to preserve state during the IsrStatus res 1 ; interrupt service routine. Display res 1 ; Value shown on 7-segment displays. PulseTimer res 1 ; Counter to time the length of pulses. BitCounter res 1 ; Number of bits being received. Command res 1 ; SIRCS command. ; ========================================================================== ; ; Reset ; ; ========================================================================== ; ResetVector code 0x0000 goto Main ; ========================================================================== ; ; Interrupt Service Routine ; ; ========================================================================== ; ISR code 0x0004 ; Preserve W and STATUS. movwf IsrW swapf STATUS,w movwf IsrStatus ; Update value shown on two 7-segment displays. movfw Display btfsc PORTB,7 swapf Display,w andlw h'F' call Get7SegBits btfss PORTB,7 xorlw b'10000000' movwf PORTB ; Increment pulse timer. incfsz PulseTimer,w movwf PulseTimer ; Acknowledge timer interrupt. bcf INTCON,T0IF ; Restore W and STATUS. swapf IsrStatus,w movwf STATUS swapf IsrW,f swapf IsrW,w retfie ; ========================================================================== ; ; Times the length of a "low" pulse. ; ; ========================================================================== ; ; Out: W - Length of pulse. ; ; ========================================================================== ; TimeLow clrf PulseTimer TimeLow.Wait btfsc PORTA,0 goto TimeLow.GoneHigh incfsz PulseTimer,w goto TimeLow.Wait TimeLow.GoneHigh movfw PulseTimer return ; ========================================================================== ; ; Times the length of a "high" pulse. ; ; ========================================================================== ; ; Out: W - Length of pulse. ; ; ========================================================================== ; TimeHigh clrf PulseTimer TimeHigh.Wait btfss PORTA,0 goto TimeHigh.GoneLow incfsz PulseTimer,w goto TimeHigh.Wait TimeHigh.GoneLow movfw PulseTimer return ; ========================================================================== ; ; Convert a hex nybble (0-F) into a format that can be displayed on a 7-seg ; ; display. ; ; ========================================================================== ; ; In: W. Out: W. ; ; ========================================================================== ; Get7SegBits addwf PCL, f dt b'00111111' ; 0 dt b'00000110' ; 1 dt b'01011011' ; 2 dt b'01001111' ; 3 dt b'01100110' ; 4 dt b'01101101' ; 5 dt b'01111101' ; 6 dt b'00000111' ; 7 dt b'01111111' ; 8 dt b'01101111' ; 9 dt b'01110111' ; A dt b'01111100' ; b dt b'00111001' ; C dt b'01011110' ; d dt b'01111001' ; E dt b'01110001' ; F ; ========================================================================== ; ; Start of the main program. ; ; ========================================================================== ; Main ; Set PORTB to be an output. bsf STATUS,RP0 clrw movwf TRISB bcf STATUS,RP0 ; Configure TMR0. bsf STATUS,RP0 bcf OPTION_REG,T0CS ; Use internal instruction counter. bcf STATUS,RP0 ; Enable TMR0 interrupt. bsf INTCON,T0IE bsf INTCON,GIE clrf Display ; ========================================================================== ; ; Main program loop. ; ; ========================================================================== ; Loop WaitCommand ; Loop around waiting for a low to indicate incoming data. btfsc PORTA,0 goto WaitCommand ; Start bit (2.4mS). call TimeLow ; Check that it's > 2mS long. sublw d'20' btfsc STATUS,C goto WaitCommand ; w<=20 ; Reset the command variable and get ready to read 7 bits. clrf Command movlw d'7' movwf BitCounter ReceiveBit ; Time the pause; should be < 1mS. call TimeHigh sublw d'10' btfss STATUS,C goto WaitCommand ; Time the input bit (0.6ms = low, 1.2ms = high). call TimeLow sublw d'9' ; Shift into the command bit. rrf Command,f decfsz BitCounter,f goto ReceiveBit bsf STATUS,C rrf Command,f comf Command,f movfw Command movwf Display goto Loop ; ========================================================================== ; ; Fin. ; ; ========================================================================== ; end
The final source code is above. I'm not sure how well-written it is, but it works; pointing a Sony remote control at the receiver and pressing a button changes the value shown on the seven-segment display. PICmicro assembly is going to get take a little getting used to; instructions are ordered "backwards" to the Intel order I'm used to (op source,destination instead of the more familiar op destination,source) and as far as I can tell literals default to being interpreted as hexadecimal as opposed to decimal.
With some luck I can now teach the 16F84 the AT protocol and replace a large number of parts on the Z80 computer project with a single IC. It does feel a little like cheating, though!
Z80 computer - Lines, cubes and inverted text
Sunday, 5th October 2008
I've made a few additions to the operating system for the computer. The Console module, which handles text input and output, now supports "coloured" text - that is you can set the text foreground and background colours to either black or white. This functionality is exposed via the BBC BASIC COLOUR statement. If you pass a value between 0 and 127 this sets the foreground colour (0..63 is white, 64..127 is black) and if you pass a value between 128 and 255 this sets the background colour (128..191 is white, 192..255 is black).
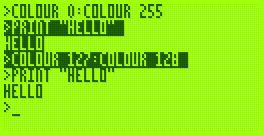
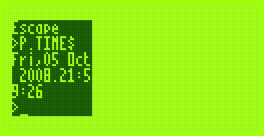
The image on the right also demonstrates another addition - you can set the text viewport to occupy a partial area of the display. This is most useful when coupled with the ability to define graphics viewports, which I have yet to add.
That said, I have started writing the Graphics module. So far all it can do is draw clipped lines, and this functionality is exposed via BBC BASIC's MOVE and DRAW statements. MOVE sets the graphics cursor position - DRAW also moves the graphics cursor, but also draws a line between the new position and the previously visited one.
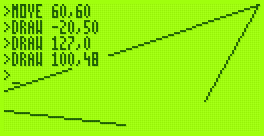
I cannot use drawing code I've written for the TI-83+ version due to differences in the LCD hardware and the way that buffers are laid out. The popular way to lay out graphics buffers on the TI-83+ is as follows:
Each grey block represents 8 pixels - one byte in LCD memory represents 8 pixels grouped horizontally. The leftmost bit in each 8-pixel group is the most significant bit of each byte. The data is stored in the buffer so that each row of the LCD is represented by 12 consecutive bytes. This left-to-right, top-to-bottom arrangement should seem sensible to anyone who has worked with a linear framebuffer. However, due to the way that the LCD I'm using is arranged, I'm using the following buffer layout:
The LCD hardware groups pixels vertically, but when you write a byte to it its internal address pointer moves right. Furthermore, the most significant bit of each byte written is at the bottom of each group. This may sound a little confusing, but actually works out as more efficient. Writing text is easy; I'm using a 4×8 pixel font, so all I need to do is set the LCD's internal address counter correctly then write out four bytes, one for each column of the text (other sensible font sizes for the display, such as 6×8 or 8×8 are just as easy to display).
Another example of improved efficiency is if you deal with pixel-plotting routines. Each pixel on the display can be addressed by a buffer offset and an eight-bit mask to "select" the particular pixel in an eight-pixel group. With this arrangement, moving the pixel left or right is easy; simply increment or decrement the buffer offset by one. Moving the pixel up or down is a case of rotating the mask in the desired direction. If the rotation moves the pixel mask from one 8-pixel group to another (which only happens every eight pixels) the buffer offset needs to be moved by 128 in the correct direction to shunt it up or down.
On the TI-83+, moving the pixel up or down requires moving the buffer offset up or down by 12; moving the pixel left or right is a rotation as before with a simple buffer offset increment or decrement to move between 8-pixel groups.
In Z80 assembly incrementing or decrementing a 16-bit pointer by one is a single instruction taking 6 clock cycles; moving it by a larger offset takes at least 21 clock cycles, 42 if you include backing the temporary register such an operation would take.
What may be interesting to see is how well a raycaster would work on a system that has video memory arranged into columns.
Without wishing to be typecast as that programmer who loves spinning cubes, I also wrote a cube-spinning demo to test the line drawing routines as well as some integer arithmetic routines I've added (the Z80 can't multiply or divide, so these operations need to be implemented in software).
It runs fairly smoothly (bearing in mind the 2MHz clock speed). The second half of the video has the Z80 running at 10MHz; it actually seems quite stable even though the LCD is being accessed at nearly five times its maximum speed (the system did need to be reset a few times until it worked without garbling the display).
Fixed and scaled CHIP-8/SCHIP interpreter
Wednesday, 24th September 2008
The CHIP-8/SCHIP interpreter now seems happy enough to run games, though the lack of settings to control how fast or slow they run makes things rather interesting.
First of all, I've hacked together a painfully simple read-only file system. Each file is prefixed with a 13-byte header; 8 bytes for the filename (padded with spaces), 3 bytes for the extension (padded with spaces) and two bytes for the file size. The above file listing can be generated by typing *. at the BASIC prompt.
I've written a new sprite drawing routine that scales sprites up to double size when in CHIP-8 mode; this allows CHIP-8 games to fill the entire screen. Unlike the existing sprite code, which I've retained for SCHIP games, it runs entirely from ROM; the existing sprite code has to be copied to RAM as it uses some horrible self-modifying code tricks. I should probably rewrite that bit next. 
As for the bug I mentioned in the last post, it was because of this:
; --- snip --- ; Group 9: ; * 9XY0 - Skips the next instruction if VX doesn't equal VY. InstructionGroup.9 call GetRegisterX ld b,a call GetRegisterY cp b jp nz,SkipNextInstruction ; Group A: ; * ANNN - Sets I to the address NNN. InstructionGroup.A call GetLiteralNNN ld (DataPointer),hl jp ExecutedInstruction ; --- snip ---
If an instruction in the form 9XY0 is executed and VX == VY, rather than jumping to ExecutedInstruction the code runs on and executes the instruction as if it had been an ANNN as well, which ended up destroying the data pointer. Adding a jp ExecutedInstruction after the jp nz,SkipNextInstruction fixed the bug.
One other advantage of the zoomed sprites is that "half-pixel" scrolls also work correctly:
...not that I've seen any game that uses them.
The last two screenshots show two versions of the game Blinky, one as a regular CHIP-8 program and the other taking advantages of the SCHIP extensions.
64KB RAM and a CHIP-8/SCHIP interpreter
Monday, 22nd September 2008
The only major hardware modification since last time is the addition of another 32KB SRAM.
;if(img.style.backgroundImage){img.style.backgroundImage='url('+img.src+')';img.src=imgs[img.src.indexOf(imgs[1])<0?1:2]}else{img.style.backgroundImage='url('+img.src+')';img.src=imgs[2];};void(0);)
This appears as two 16KB pages in the $4000..$7FFF slot. Currently only the first page is used for OS variables and scratch space, freeing up the upper 32KB entirely for BBC BASIC's use.
One other minor hardware addition is support for a dual-coloured LED on the control port. This LED will be used to signify file access - reads by a green LED and writes by a red LED. As such I haven't implemented a proper file system, but typing SAVE "FILE" or LOAD "FILE" at the prompt will transfer data between the Z80 RAM and a 24LC256 32KB EEPROM. The routines do not pay attention to any file name specified - the first two bytes on the EEPROM indicate the file size, and the rest of the EEPROM is the file. I think some sort of simplified version of FAT may work well, as the EEPROM has a natural page size of 64 bytes which could be used in place of clusters.
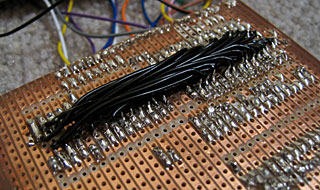
Adding the second 32KB SRAM required soldering wires to the underside of the stripboard, not something I'd recommend!
As I have not yet added any graphical commands to BBC BASIC, and as porting assembly programs to this hardware is going to be a bit of a pain until I decide on the way the OS is going to work, I decided to try and port Vinegar to the system. Vinegar is a CHIP-8 and SCHIP interpreter - CHIP-8 programs being simple bytecode and so relatively simple to interpret.
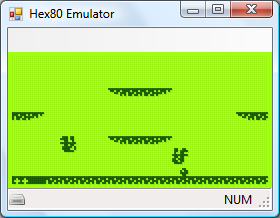
The code I had written was difficult to port, however, being inefficiently and messily written, so I ended up rewriting all of it apart from the sprite drawing routines. The TI-83+ LCD follows the usual trend of storing 8 horizontal pixels in each byte of video memory. The LCD I have stores 8 vertical pixels in each byte of video memory, which means that each 8×8 pixel block in memory needs to be rotated by 90° before being sent to the LCD hardware. This is understandably very slow, and not helped by the Z80 only running at 2MHz. To further complicate issues, games rely on two 60Hz timers, and I have no timing hardware. The current version of the interpreter has some bugs, but is good enough to run some SCHIP programs.
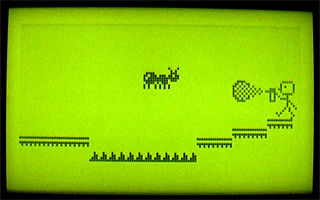
CHIP-8 programs are displayed squashed in the top-left hand corner, as they're designed to run in a 64×32 video mode unlike SCHIP's 128×64 (happily, the resolution of the LCD) - typically, the one thing I really did need to fix for the new hardware, the sprite code, is the only thing I copied over. In reality, CHIP-8 graphics would need to be scaled up to fit the screen. Working out a way of getting the system to operate at 10MHz would really be a welcome upgrade!
Times, backlights and off-page calls
Sunday, 14th September 2008
Dates, times and backlights
I'm using a DS1307 real-time clock to provide the computer with real-time date and time functions. It's a great little chip - all it needs is power, two lines for I2C communications, a 32768Hz crystal between two pins and a back-up battery to keep it ticking when main power is removed and it's happy. That accounts for seven pins; the last remaining pin can be used as a one-bit output (you can set it to a high or low state in software) or it can be configured to output a square wave at 1Hz, ~4kHz, ~8kHz or ~32kHz.
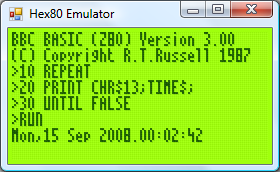
BBC BASIC can access the clock via the TIME$ pseudo-variable. This string variable returns the date and time in the format Sun,14 Sep 2008.15:20:00, and you can set the clock by assigning to the variable. When setting the clock you can specify either the date, the time, or both. Parsing the string has been an interesting exercise in Z80 programming, as it's not something I've ever attempted without regular expressions before!

The only hardware modification since last time is a very poorly implemented software control of the backlight. The fifth bit of the control port specifies whether the backlight is on or off, and it can be toggled with the *BACKLIGHT command. I say "poorly implemented" as the transistor driver I'm using to interface the hardware port with the backlight LEDs results in a much dimmer backlight than when I had the LEDs hooked up directly to the power supply (on the positive side, at least the 5V regulator's heatsink is cool enough to touch - the backlight draws a lot of current).
Calling off-page functions
Now that I have access to all eight 16KB "pages" that make up the 128KB OS ROM, it may help to explain how one can use all of this memory. After all, if page 1 is swapped in and you wish to call a function on page 2, a regular Z80 call isn't going to work as you need to swap page 2 before calling the function then swap page 1 back in afterwards.
The trick is to exploit the way that the Z80 handles calling subroutines. There is a 16-bit register, PC, which stores the address of the next instruction to execute. When you call a subroutine, the Z80 pushes PC onto the stack then sets PC to the address of the subroutine. When you return from a subroutine (via the ret instruction) the Z80 simply pops the value it previously pushed onto the stack and copies this back to PC. Instead of calling the target subroutine directly, you call a special handler that is available on every page. Following your call is 16-bit identifier for the off-page function you wish to call. This handler then (prematurely) pops off the return address from the stack, reads the 16-bit value that follows it (which is the indentifier of the function you wish to call), looks up the page and address of the target function, swaps in the correct page and calls it as normal. When the function returns, the handler then swaps back the calling page and jumps back to the return address.
The Z80 has a series of rst instructions that call fixed addresses within the first 256 bytes of memory. These instructions are useful as they're small (one byte vs three bytes for a regular call) and fast, so I'm using rst $28 to call the off-page call handler (for no other reason than it's the same as the handler on the TI-83+).
As an example, let's say you had this function call at address $2B00:
$2B00: rst $28 $2B01: .dw $30F0 $2B03: ; We'd return here.
When the Z80 executed that rst $28 it would push $2B01 (address of the next instruction) to the stack then jump to $28. The handler at $28 would do something like this:
pop hl ; hl is a 16-bit register and would now contain $2B01 ld e,(hl) ; Read "e" from address pointed to by hl, now equals $F0 inc hl ; hl = $2B02 ld d,(hl) ; Read "d" from address pointed to by hl, now equals $30 inc hl ; hl = $2B03 ("real" return address) push hl ; push hl back on the stack so when we return from here we end up in the correct place.
Now, de is $30F0 - this is the identifier of the function we're calling. In my case, the identifier points to a function table on page 0. Each entry in the table is three bytes - one byte for the page index and two bytes for the address of the function on the that page. We'd need to do something like this:
in a,(Page) ; Read the current page into A.
push af ; Push A and F to the stack for later retrieval.
and ~7 ; Mask out the lower three bits of the address.
out (Page),a ; Sets current ROM page to 0.
ex de,hl ; Exchanges de and hl, so hl now points to the function identifier.
or (hl) ; ORs contents of memory at (hl) (ie, page number) with a, to set the target page.
inc hl
ld e,(hl) ; e = LSB of target address
inc hl
ld d,(hl) ; d = MSB of target address
ex de,hl ; hl = target address.
out (Page),a ; Swaps in the correct page.
ld de,ReturnFromHandler ; Address to return to. push de ; Store on stack. jp (hl) ; Set pc = hl. ReturnFromHandler ; Swap back the original page which was pushed earlier... pop af out (Page),a ret ; ...and return to the calling page!
A further advantage of using rst $28 to replace call is that both are the same size, so the assembler can check if you're calling an address on the same page or a different one and insert the regular (and much faster) Z80 call in places where you don't need to swap the page.
Finally, the obligatory video, this time showing a clock that toggles the backlight once a second.
Bank-Switching Memory and I2C
Thursday, 11th September 2008
Cheers for the comments. As EasilyConfused pointed out, I have done calculator programming in the past, which makes this much easier - learning Z80 assembly to program a calculator influenced the choice of CPU in this computer, and porting BBC BASIC to the calculator showed that with a minimal amount of code to sit between it and the hardware you'd have a decent operating system with very little work. And if a Terminator-related name is good enough for the UK military, it should be good enough for this project...
The I/O board from a few posts ago has undergone a few revisions:
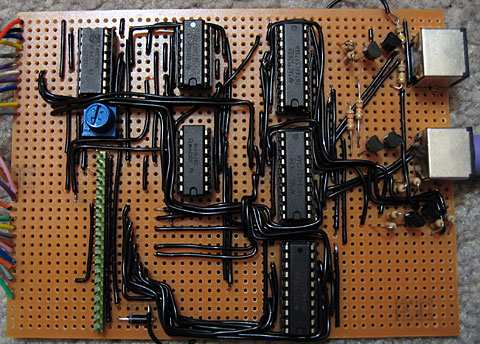
Both PS/2 ports are now fully wired up, though only the lower one is currently used by the OS for keyboard input. I will need to adjust the AT protocol routines (the AT protocol is used to control both keyboard and mouse) to support multiple physical ports, as it was adapted from code I wrote for the TI-83+ calculator and as such only supports one device at a time. The mouse position will be polled by calling ADVAL(axis%), which on the BBC Micro would return the joystick position (axis% specifies the type of information to retrieve from the mouse - a value of 0 returns the buttons as a bitfield, 1 returns the movement in the X axis, 2 the movement in the Y axis and 3 the amount the scrollwheel has been scrolled).
At the very bottom of the circuit board is another 8-bit latch. This is for the (currently) write-only control port. The three least significant bits specify the current ROM page (one of eight 16KB ROM pages can be swapped in for a total of 128KB) and the next bit specifies one of two 16KB RAM pages accessible in the $4000..$7FFF address range. One of the other bits will be used to switch the LCD backlight on and off in software, one more may be connected to a buzzer, and I'm sure I can find some use for the last two. As it's write-only, its current state needs to be stored in RAM so that you can change bits of it (eg when changing the ROM page you wouldn't want to change the backlight status at the same time; you'd need to retrieve the current state and mask in the bits you wish to preserve). This is obviously an ugly hack, and I'm hoping I'll be able to use some of the space to the right of the latch IC on the circuit board to add the other latch to allow the port to be read as well (an I/O port needs two latches - an output latch that takes data from the data bus and outputs it to external hardware, and an input latch that takes data from external hardware and puts it back on the data bus).
The first test of the new ROM paging hardware was to display a simple animation. Assuming 1KB on each ROM page was taken up by the animation playback program, that leaves 15KB per ROM page. A frame (128×64 pixels) is 1KB, so that's 15 frames per page, or 120 frames total. I converted a clip from Pink Floyd's Arnold Layne music video to a suitable format and wrote a playback routine that could run from RAM. When the computer booted it would copy the player to RAM and run it from there as it could then run uninterrupted when different ROM pages were swapped in to read the frame data.
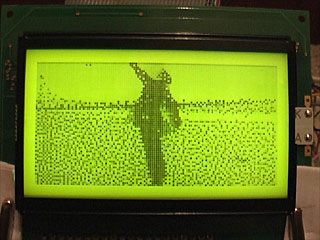
An animation like this is a useful test, as if the ROM paging didn't work properly (simulated by holding the three ROM page selection lines low) the software would still run, but would just loop the first 15 frames (or play chunks of 15 frames out of sequence) instead of crashing.
Another addition to the circuit above is the cluster of discrete transistors and resistors under the lowest PS/2 port. This is the same sort of pair of open-collector I/O data lines that drive each PS/2 port, except that the two data lines are fed out of the I/O board and back to the breadboard that's currently sitting between the memory board and the I/O board to these two simple 8-pin chips:
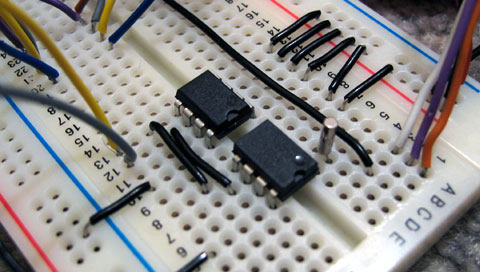
This is the I2C bus, a simple, low-speed, two-wire bus that will allow other components be easily connected to the computer. The I2C protocol is implemented in software. The two chips in the above image are a DS1307 real-time clock (foreground, with quartz crystal) which I hope to use for timing purposes and a 24LC256 32K×8 EEPROM which I hope to use for file storage. I would need to have some way of accessing the I2C bus externally (to plug in EEPROMs as removable storage) as well as supporting the internal devices.
I haven't yet done any work on supporting I2C devices properly, but I have added I2C bus emulation to the emulator I'm using to develop the OS. BBC BASIC will pass commands prefixed with a *STAR to the operating system, so I've added a *I2CPROBE command that will hammer through all available addresses and list any devices that acknowledge a write request.
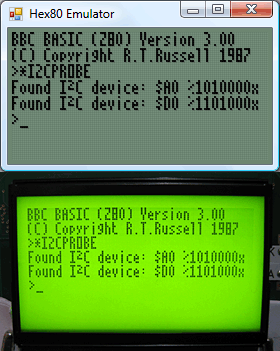
$A0 is the EEPROM and $D0 is the clock.
I think I may have dug myself into a hole for CPU timing. I mentioned that I will need to drop the CPU clock to 2MHz when accessing the LCD; unfortunately, switching between 2MHz and 10MHz doesn't seem to work very well. I can run the system relatively stably at either speed (though at 10MHz data sent to the LCD is occasionally corrupted) but if I try and switch dynamically (eg switching from the 10MHz to the 2MHz clock when /IORQ goes low to indicate an I/O request) the system locks up. My assumption is that during time it takes the logic gates that perform the 10MHz/2MHz switch to properly settle into their new state (which is in the tens of nanoseconds) the clock signal stutters a little, effectively producing a clock signal (albeit a brief one) well over 10MHz. I don't have an oscilloscope to verify this, however. 
Running BBC BASIC on a home-built computer
Sunday, 7th September 2008
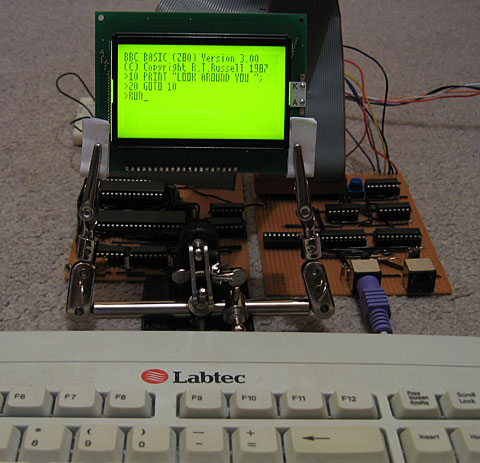
This computer needs a name - I'd welcome any suggestions!
I have built a circuit on another piece of stripboard that will handle memory, clock signal generation and the Z80 itself.
A few posts ago I was wondering about how I'd partition memory. To date I've been using a very simple circuit where the lower 32KB of addressable memory is mapped to ROM and the upper 32KB is mapped to RAM. As my ROM chip is 128KB and I have two 32KB RAM chips, this seems a bit wasteful.
The memory layout I'm now using is quite simple: the upper 32KB is still mapped to RAM. However, only the first 16KB is mapped to ROM, and the three most significant bits of the ROM chip's address lines are connected to a device on the I/O board so that one of its eight 16KB "pages" can be swapped in. The next 16KB will be mapped to RAM, and the most significant bit of the RAM chip's address is connected to the same device on the I/O board so one of its two 16KB "pages" can be swapped in.
For more information, see the Wikipedia article on bank switching. There is a potential problem here; the Z80 uses particular fixed addresses for certain operations. The three most obvious ones are $0000 (jumped to on reset), $0038 (address of maskable interrupt handler) and $0066 (address of non-maskable interrupt handler). As which 16KB bank switched in at power-on is effectively random, the easy way around this problem is to ensure that the first 256 bytes or so of every ROM page has the same code assembled on it. This means that whichever page is swapped in on boot doesn't matter, as the same common boot code is available on each page.
The assembled memory board looks like this:
;if(img.style.backgroundImage){img.style.backgroundImage='url('+img.src+')';img.src=imgs[img.src.indexOf(imgs[1])<0?1:2]}else{img.style.backgroundImage='url('+img.src+')';img.src=imgs[2];};void(0);)
I have only attached one of the 32KB RAM chips. The wiring was becoming a bit of a nightmare (I think I'll need to solder to the track side of the stripboard to fit in that other RAM chip) so for the moment the system can only access the fixed 32KB RAM. I haven't yet added the device on the I/O board to handle bank switching, so for the moment the ROM is permanently configured to access the first 16KB page by pulling the its three externally controllable address lines low.
That said, this machine does genuinely run BBC BASIC (the last system only ran a mockup with a dummy header at the top of the screen). I've done quite a bit of work on the OS in the emulator and it works pretty well there, and with a minor adjustment to cram it onto a single 16KB page it works well on hardware too.
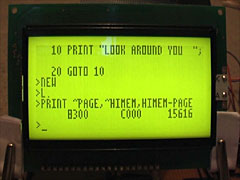
The row of chips along the bottom of the memory board are responsible for generating the clock signals that drive the computer. If this looks needlessly complex, that's because it can run at either 10MHz or 2MHz and generates the E signal for LCD access. The CPU needs to drop to 2MHz when accessing the LCD (the LCD driver can't keep up, otherwise) so I'll probably end up connecting the input for this 2MHz/10MHz switch to the LCD chip enable pins so that normally the system runs at 10MHz but drops to 2MHz when accessing the LCD. Allowing the user to drop to 2MHz to save power is an appealing idea, however...
2MHz should be enough for anyone
Wednesday, 27th August 2008
 LCD Timing
LCD Timing
Last time I discussed the hardware I mentioned I had LCD timing issues. I have finally resolved them, but this has been the most time consuming part of the project so far.
The first thing to sort out was the LCD's E pin. Once you have set up the LCD's input pins to a state where they're ready to read or write data, you need to drive this pin high. I had had some success by holding it high permanently and relying on the Z80 to set all the other to the right state at roughly the same moment, but this was inaccurate and resulted in occasional display glitching.
Consulting the datasheet, it appears that once the input pins are ready E needs to be held low for at least 450nS and then needs to be driven high for at least 450nS. Hmm. During an I/O request (and once the Z80 has prepared the address and data bus) there's a delay of 1 clock cycle, then /IORQ is held low for about 2.5 CPU cycles. That is the window of opportunity. I have connected a binary counter to the Z80's clock signal and take the least significant bit of the output - every clock cycle this output toggles between a low and a low, effectively halving the CPU clock rate. I then connect the counter's reset pin (which overrides the clock input and forces it to output zero) to /IORQ. The result is that when the Z80 is not accessing hardware the counter is held in its reset state, and E is held low. When the Z80 holds /IORQ low, the counter starts up and outputs a zero for one CPU cycle, outputs a one for the next CPU cycle, then outputs a zero for the next half clock cycle at which point /IORQ goes high again and it is back to zero anyway. This is exactly what's needed!
This also allows us to calculate the maximum CPU clock rate. If we are generous and allow E to be low for 500nS then high for 500nS, that gives us a CPU clock rate of 1/500nS=2MHz.
Anyhow, that's one problem resolved, but there was still one nasty bug. When reading from the LCD it would occasionally end up writing to the area that was being read or, in worse cases, the Z80 would "crash". The LCD has a R/#W pin that is held high when reading and held low when writing. I had connected it directly to the Z80's /WR pin, which is high normally and low when writing. The problem here is "normally" as the LCD was expecting to be read even when the Z80 wasn't requesting a /RD. When being read, the LCD expects to put something onto the data bus, and it appeared that it kept thinking that it needed to put something on the bus when it wasn't needed. This caused fighting with the other chips that were trying to put their own values on the data bus, hence the crashes as the Z80 received invalid data.
The answer was very easy; simply connect the Z80's /RD pin to the LCD's R/#W pin via a NOT gate. In the default state the pin is held low (LCD expects a write and leaves the data bus alone), and only goes high during a /RD. The LCD interface is now very robust.
CPU Clock
Above I mention the calculation for the maximum clock rate. Rather than use the 555 for timing, I switched to using a 10MHz crystal resonator oscillator. I'm using the serial resonant circuit from z80.info with a 74F04 hex inverter (second circuit down). Fortunately the counter chips I have are decade counters (ie, designed to count from 0 to 9) made up of a ÷2 and a ÷5 section. I can connect a 10MHz oscillator to the ÷5 section and use the output of that to drive the CPU. In the final design I'd like to add a "hardware control port" with a bit that would let the programmer choose 2MHz or 10MHz mode by setting or resetting a particular output bit (other control bits would include switching the LCD backlight on or off and a buzzer for beeping sound output).
PS/2 Ports
As a friend pointed out, the 8-bit open-collector I/O port (which will drive two PS/2 ports, the I2C bus and TI calculator link port) had a flaw - there was no resistor on the base of the output transistors. The result is that if the output latch tries to drive the transistor base high, the transistor switches on and shorts the output of the latch to ground. This was clearly a problem in the design as the LCD backlight dimmed when trying to output to these ports as they drew a excessive amount of current when effectively short-circuited. A 22K resistor between the output latch and base of the transistor fixed the problem.
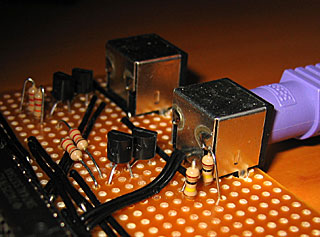
In the above photo, I've also added two 100K resistors to hold the output high when floating, but only to the foreground PS/2 port for the time being. I don't think I'll be controlling a mouse yet!
Revised OS
With a little modification of the Emerson PS/2 library I've got a basic keyboard driver up and running on the hardware. All the OS does for the moment is check for keys and display them on the screen. It's currently hard-coded to the UK layout, as I haven't yet decided how I'm going to handle storage and by keeping the layout in ROM it at least frees up a few hundred bytes of RAM that would otherwise need to be there for the scancode translation tables.
Z80 computer with a primitive I/O board
Wednesday, 20th August 2008
A computer needs some way of interacting with the outside world via input and output devices. It's about time, then, that the Z80 computer project acquires a section dedicated to I/O.
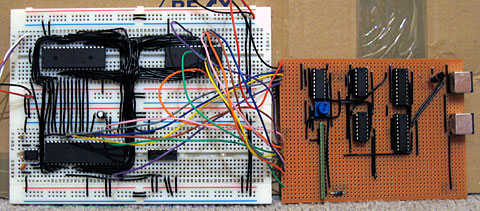
The Z80 differentiates between memory and I/O devices, though both share the data bus and the address bus. You can control I/O devices using the in (input) and out (output) instructions. When you input or output you must specify a device address and a value or target register. For example,
in a,($20) ; Read a value from device $20 and store it in A. ld a,123 out ($40),a ; Output 123 to device $40.
When you write to a device, the following happens:
- The address bus is set to the address of the device to output to.
- The data bus is set to the value to be written to the device.
- The /IORQ and /WR pins on the Z80 go low.
- The device processes the written data.
- The /IORQ and /WR pins on the Z80 go high.
Reading from the device is very similar:
- The address bus is set to the address of the device to read from.
- The /IORQ and /RD pins on the Z80 go low.
- The device puts the value to read onto the data bus.
- The Z80 reads the value on the data bus.
- The /IORQ and /RD pins on the Z80 go high.
(Accessing memory is a similar procedure, except with the /IORQ pin replaced by the /MREQ pin).
Interfacing I/O devices to a Z80 CPU should be rather straightforwards, then. I am using a 74HCT138N 3-to-8 line inverting decoder to handle the address bus input and /IORQ signal. This IC has three address inputs and 8 outputs. If the address input is %000, output 0 is low and all the other pins are high; if the address input is %001 output 1 is low and all the others are high; if the input is %010 output 2 is low and all the others are high (and so on and so forth). /IORQ is connected to another input on the chip, /E1, which causes all of the pins to go high when it is high regardless of the address input.
What does this mean in practice? Well, most devices have a "chip enable" or "chip select" input pin. When this input is active the device performs its function, but when the input is not active the device is deactivated and doesn't respond to any other inputs or output anything. By connecting each output of the 3-to-8 decoder to a particular device's chip enable pin I can ensure that each device is only activated when its address is specified on the address bus and the /IORQ pin on the Z80 is low.
I have connected the Z80's A5-A7 to A0-A2 on the 3-to-8 decoder. This means that the first device has a base address of $00, the second $20, the third $40 and so on at increments of $20. This might sound a little odd, but has a reason. Some devices, such as the LCD, have sub-addresses of their own. In the case of the LCD, it has a pin that specifies whether you're dealing with an instruction (such as a command to switch the display on or off or read the LCD status) or some data (which forms part of the picture on the LCD). By attaching this pin directly to the Z80's A0 and the LCD's chip select pin to output 1 from 3-to-8 decoder you end up with an LCD instruction port at $20 and an LCD data port at $21.
An LCD is all well and good, but we'll need to take input from the user. To accomplish this, I'm going to supply two PS/2 ports and implement the AT protocol (as used by PS/2 keyboards and pointing devices) in software. Each device only requires two open-collector data lines (data and clock), so a single I/O device that provides eight I/O lines would be useful.
The design I'm going for uses two 74AC373 octal transparent latches. When the latch enable input pin is held high whatever value is on the input passes through to the corresponding output. When the latch enable pin goes low, the last value that was latched at the input is still output. These particular latches also have an output enable pin that can be used to disable the outputs and let them "float" (ie, other devices can then drive that particular connection high or low as required). In this instance, one latch has its output enable pin activated so that it always outputs the last value written to it and has its latch enable pin connected to the Z80's /WR pin. The other latch has its latch enable pin activated so that it always outputs the values at its input and has its output enable pin connected to the Z80's /RD pin.
The transistors on each output are used to provide open-collector outputs. When the base of the transistor is held low, the transistor is "switched off" and its output floats, and so can be driven by external circuitry. When the base of the transistor is held high, it switches on and effectively connects the output to ground. A pull-up resistor ensures that the pin has a high signal when not connected to anything. This arrangement is useful as each pin can be driven low by either device and so works as an input or an output (for a real-world example, an AT keyboard usually outputs a clock signal on one line to the host when sending data, but if the host pulls the clock line low it can inhibit communication and the keyboard buffers the data to send instead).
;if(img.style.backgroundImage){img.style.backgroundImage='url('+img.src+')';img.src=imgs[img.src.indexOf(imgs[1])<0?1:2]}else{img.style.backgroundImage='url('+img.src+')';img.src=imgs[2];};void(0);)
Rather than build the circuit on breadboard, I went straight to stripboard. The above photo shows an incomplete version of the output board. Only one PS/2 port is wired up at all! The pin header to the left is to connect the LCD to. The coloured wires at the extreme left connect this I/O board to the rest of the computer.
;if(img.style.backgroundImage){img.style.backgroundImage='url('+img.src+')';img.src=imgs[img.src.indexOf(imgs[1])<0?1:2]}else{img.style.backgroundImage='url('+img.src+')';img.src=imgs[2];};void(0);)
I have modified the Z80 board I was using last time to add support for RAM. The 3-to-8 decoder in the bottom right is used to partition the address space into two 32KB regions. The lower 32KB is mapped to ROM, and the upper 32KB is mapped to RAM. This wastes 75% of the ROM chip (it's a 128KB chip) but without a more complex memory management unit this will have to do for the moment. The most significant bit of the address bus, A15, is fed into the 3-to-8 decoder along with the /MREQ pin.
The test software is a Z80 program that displays an animation on the LCD using 20 frames (1KB per frame) stored in ROM.
The Z80 is still not breaking MHz speeds, but there are problems here. I have not interfaced the LCD correctly, as its timing patterns for reading and writing data are quite different to those used by the Z80. Bizarrely, holding the E pin on the LCD permanently high appears to work 99% of the time, even though the datasheet indicates that it should be used to clock data in or out. The result is glitches in the data sent to the LCD, usually on the left hand side (the left hand side of the display has a propensity to believe it's been sent the "switch off" command). I'm not sure I'll be able to remedy this situation. Judging by the datasheet it looks like the LCD does its stuff when the E pin goes from a low to high state (the Z80 does everything when /IORQ goes low), so maybe simply inverting /IORQ and pumping it into E will do the trick.
Z80 Light-flasher
Wednesday, 13th August 2008
Now armed with a flash programmer, I thought it about time to try and build a Z80-based system.
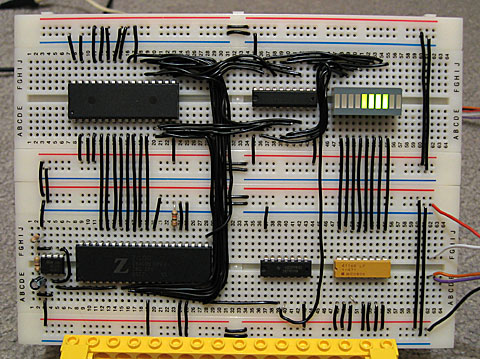
Not much to look at, and it doesn't do much either. The large IC in the bottom-left, prominently marked Z, is the Z80 itself. To its left is a 555, generating a ~220Hz clock signal (yes, Hz, not MHz or even kHz). Above the Z80 is another large chip - this is the 128KB flash ROM. The eight parallel wires between them are the address bus - only A0 to A7 are connected. This only lets the Z80 address 256 bytes, but that should be enough for testing.
To the right of the flash ROM is an octal latch. This is used to provide an 8-bit output port for the system, which is connected to the LEDs to its right. As the latch's latch enable pin is active high, unlike everything else in the system (which is active low - ie, it does something when you drive it low) I have to put a NOT gate - the final black IC to the right of the Z80 - between it and the Z80's /WR (write) pin. I do not do any address decoding or even check the /IORQ pin, so any value written to to any hardware device or memory address will end up on the LED display. Not that that really matters, as there is a conspicuous lack of RAM in the system!
The large physical size and tedium of wiring even such a primitive system as this makes me wonder whether it's worth jumping straight to stripboard for subsequent hardware revisions...
For the curious, the program running on the Z80 is as follows.
.for p = 0 to 7 .defpage p, kb(16), $0000 .loop .emptyfill $FF .page 0 im 1 di -- ld hl,LightSequence ld b,LightSequenceEnd-LightSequence - ld a,(hl) out (0),a inc hl djnz - jr -- LightSequence .db %00000001 .db %00000010 .db %00000100 .db %00001000 .db %00010000 .db %00100000 .db %01000000 .db %10000000 .db %01000000 .db %00100000 .db %00010000 .db %00001000 .db %00000100 .db %00000010 .db %00000001 .db %00000010 .db %00000100 .db %00001000 .db %00010000 .db %00100000 .db %01000000 .db %10000000 .db %01000000 .db %00100000 .db %00010000 .db %00001000 .db %00000100 .db %00000010 .db %00000001 .db %00000011 .db %00000111 .db %00001111 .db %00011111 .db %00111111 .db %01111111 .db %11111111 .db %11111111 .db %00000000 .db %11111111 .db %00000000 .db %11111111 .db %00000000 .db %11111111 .db %00000000 .db %11111111 .db %00000000 .db %11111111 .db %00000000 .db %11111111 .db %11111110 .db %11111100 .db %11111000 .db %11110000 .db %11100000 .db %11000000 .db %10000000 .db %00000000 .db %10000000 .db %11000000 .db %11100000 .db %11110000 .db %01111000 .db %00111100 .db %00011110 .db %00001111 .db %10000111 .db %11000011 .db %11100001 .db %11110000 .db %01111000 .db %00111100 .db %00011110 .db %00001111 .db %10000111 .db %11000011 .db %11100001 .db %11110000 .db %01111000 .db %00111100 .db %00011110 .db %00001111 .db %00000111 .db %00000011 .db %00000001 .db %00000000 LightSequenceEnd .echoln strformat("Size: {0} bytes", $)
Emulators and neatened wiring
Tuesday, 12th August 2008
I've decided to switch to a regular 10MHz Z80 rather than a Z180, given the difficulty of using an SDIP 64. I now have a DIP 40 Z80 ready for use, but as I don't have the programmer for the Flash chip (which will hold the OS) there's not much I can do with it physically. I have therefore cobbled together a basic emulator to help develop some of the software beforehand.
To cut hardware costs I'm going to try and handle input in software. One bit of hardware I'm planning on having is an eight-bit open collector I/O port. Open collector pins float high in their reset state, and any device connected to the pin can drive it low. AT devices (keyboard and mouse) use this type of electrical connection, as does the I2C bus and the TI calculator link port. I can use up the eight pins easily - two pins per AT device (keyboard and mouse) makes four, two pins for the I2C bus and two pins for a TI calculator link port.
The I2C bus I mentioned above is a simple way to enhance the computer once built. There will be one device permanently attached to the bus, a DS1307 real-time clock, which will be used to provide time-keeping functions for the OS as well as generating periodic interrupts (the chip could be configured to trigger an interrupt 100 times a second, useful for timing game logic). I could then leave empty space on the circuit board to add other I2C devices over time, or have a socket on the case that could be used to plug in additional I2C modules.
Now that I have some more tools, namely a desoldering pump, I tidied up the horrible hack job I'd done on the graphical LCD (replacing the multiple wires with a single pin header).
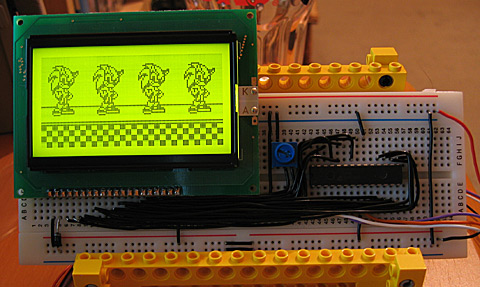
Yes, still the PICAXE here, but I'm using its 256 byte EEPROM to store a 32×64 pixel image of Sonic that is repeated four times horizontally.
I'm still not sure what I'm doing with regards to memory or storage. I'm still working on the simple assumption that ROM is 32KB ($0000..$7FFF) and RAM is 32KB ($8000..$FFFF) but this wastes a lot of memory and isn't very flexible at all. I've planned a bank-switching MMU, but as this will require at least four registers to store what appears in each of the four 16KB windows it will end up being physically very large and painful to wire.
As for storage, I have no idea. I have some 32KB I2C EEPROMs, but 32KB isn't exactly very large. Alternatively, I have an old 512MB SD card, and could try talking to it over bit-banged SPI. (SD cards use 3.3V, though, which complicates matters - not to mention that bit-banged SPI is going to be a little sluggish). I also have a USB module which can talk to USB mass storage devices over a serial connection, so maybe I should add a UART to the project. Adding a fully-blown USB module (which also plays WMA, MP3 and MIDI files) to such an otherwise low-tech computer feels like heresy, though.
Experimenting with a 32KB RAM
Monday, 4th August 2008
The next component I thought I'd experiment with is the RAM. The project is an analogue recorder - a circuit that samples an analogue input periodically and saves it in RAM, and can be configured to play the recorded signal back afterwards.
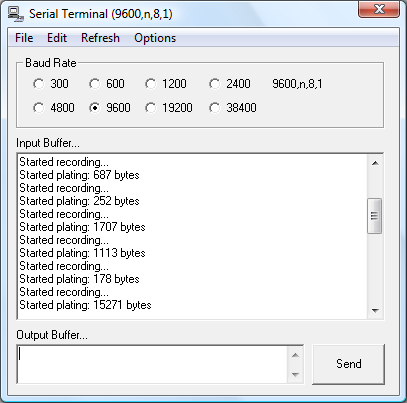
Yes, it says plating.
A single RAM chip offers 32K with an eight-bit word size. This requires fifteen lines to address it, A0..A14. The PICAXE-28X1 that is to control the circuit does not have enough output pins to be able drive this address bus and a data bus (to transfer values to and from RAM) and a still have enough pins left over to control the various components. To get around this, two octal (eight-bit) latches are used to drive the address lines, A0..A7 from one chip and A8..A14 from another. The inputs to these latches are connected to the data bus (PortC on the PICAXE), and two pins on the PICAXE are set aside to trigger the latch enable pins on either latch.
What this means in practice is that if you wished to change the current address to $1234 you would put $34 on the data bus and trigger the latch that corresponds to the least significant byte of the address, then put $12 on the data bus and trigger the latch that corresponds to the most significant byte of the address.
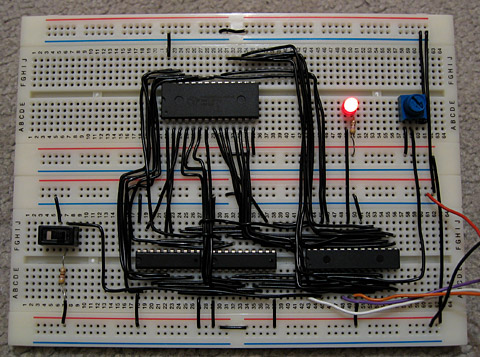
Any hobbyist can have wire insulation in any color that he wants so long as it is black.
A 10K potentiometer provides the required analogue input and an LED provides the output. The switch on the left is used to change between recording and playback modes. The large chip at the top is the RAM, the two small ones in the middle are the octal latches and the medium one on the right is the PICAXE-28X1.
As only 15 lines are needed to address 32KB, the most significant bit of the address bus is wired to the /WE pin of the RAM chip. This pin determines whether we're writing to (low) or reading from (high) the chip. This effectively means that addresses $0000..$7FFF are used when writing and addresses $8000..$FFFF are used when reading.
The only remaining connections to the RAM chip required are chip enable (/CE) and output enable (/OE). When chip enable is low, the RAM chip can be accessed; when high, it ignores all input. When not in use we therefore make sure that chip enable is high. When output enable is low, the RAM chip puts the value at the current address onto the data bus, so we need to pull this low when reading but make sure it's left high most of the time so that the RAM chip doesn't interfere with other devices trying to put a value on the data bus.
The code for the test program is as follows:
; Pins: Symbol RamChipDisable = 4 Symbol RamOutputDisable = 5 Symbol AddressLatch0 = 6 Symbol AddressLatch1 = 7 ; Registers: Symbol RamValue = B0 Symbol RamAddress = W1 ; B3:B2 Symbol RamAddressLow = B2 Symbol RamAddressHigh = B3 Symbol RamPointer = W2 ; B5:B4 Symbol RecordingLength = W3 ; B7:B6 Boot: Let DirsC = $00 High RamChipDisable High RamOutputDisable Low AddressLatch0 Low AddressLatch1 Let RamPointer = 0 SetFreq M8 Main: StartPlaying: SerTxd ("Started playing: ", #RecordingLength, " bytes", CR, LF) Let RamPointer = 0 Pause 100 PlayingLoop: If PortA Pin1 = 1 Then StartRecording ; Read stored value from RAM. Let RamAddress = RamPointer GoSub ReadRam ; Set LED brightness to stored value. Let W4 = RamValue * 4 HPwm PwmSingle, PwmHHHH, %0100, 255, W4 ; Increment playback pointer and loop if hit end. Let RamPointer = RamPointer + 1 If RamPointer = RecordingLength Then RamPointer = 0 EndIf ; Loop back. GoTo PlayingLoop StartRecording: SerTxd ("Started recording...", CR, LF) Let RecordingLength = 0 Pause 100 RecordingLoop: If PortA Pin1 = 0 Then StartPlaying ; Read value from ADC. ReadAdc 0, RamValue ; Set LED brightness to read value. Let W4 = RamValue * 4 HPwm PwmSingle, PwmHHHH, %0100, 255, W4 ; Store value read from ADC into RAM. Let RamAddress = RecordingLength GoSub WriteRam ; Increment record pointer. Let RecordingLength = RecordingLength + 1 GoTo RecordingLoop WriteRam: ; Set up address bus: Let DirsC = $FF Let RamAddressHigh = RamAddressHigh & %01111111 Let PinsC = RamAddressHigh High AddressLatch1 : Low AddressLatch1 Let PinsC = RamAddressLow High AddressLatch0 : Low AddressLatch0 ; Set up data bus and write: Let PinsC = RamValue Low RamChipDisable High RamChipDisable Let DirsC = $00 Return ReadRam: ; Set up address bus: Let DirsC = $FF Let RamAddressHigh = RamAddressHigh | %10000000 Let PinsC = RamAddressHigh High AddressLatch1 : Low AddressLatch1 Let PinsC = RamAddressLow High AddressLatch0 : Low AddressLatch0 ; Set up data bus and read: Let DirsC = $00 Low RamOutputDisable Low RamChipDisable Let RamValue = Pins High RamChipDisable High RamOutputDisable Return
As before, there's a simple video of the circuit in action.
Back to Hardware
Friday, 1st August 2008
I enjoy dabbling with low-level programming, but have never actually built a computer to run these programs. I think it's time to correct that, and as the BBC BASIC project has required me to develop an almost complete Z80 OS (the only thing that's left for the TI-OS to do is manage files) I thought a Z80 computer would be a good start.
The planned specs are (as a starting point):
- 10 MHz Z80180 CPU;
- 64KB RAM (2 32K×8 SRAM chips);
- 128KB Flash ROM;
- Graphical LCD;
- Simple joypad input;
- Keyboard input (AT using either software AT routines or dedicated microcontroller).
The first spanner in the works is the Z80180, as I didn't read the datasheet closely enough and it's in a DIP 64 package with 0.07" pin spacing instead of the standard 0.1" pin spacing. I'll need to find some way of constructing an adapter so I can use it with my breadboards and stripboard.
In the meantime, I've concentrated on the graphical LCD. I picked a 128×64 backlit graphical LCD for the princely sum of £16. It's very easy to control - you hook up it up to a 8-bit data bus to transfer image data and instructions and a handful of control pins to indicate what you're doing on that bus (reading or writing, whether you're sending an instruction or some image data, that sort of thing) and that's it - the only supporting circuitry it requires is a 10K potentiometer to act as a contrast control and power for the display and backlight.

To experiment with the LCD, I'm using a PICAXE-28X1 microcontroller, programmed in BASIC. There isn't much space to store graphics, so I'm using a 32 character font (at eight bytes per character, that takes up all 256 bytes of free EEPROM space!)
; LCD data bus should be connected to port C. Symbol LcdRegisterSelection = 0 ; D/I : 4 Symbol LcdReadWrite = 1 ; R/W : 5 Symbol LcdStartEnable = 2 ; E : 6 Symbol LcdChipSelect1 = 3 ; CS1 : 15 Symbol LcdChipSelect2 = 4 ; CS2 : 16 Symbol LcdReset = 5 ; /RST : 17 ; Storage for console state variables. Symbol ConsoleX = B10 Symbol ConsoleY = B11 Symbol ConsoleChar = B12 GoSub LcdInit ; Initialise LCD. B0 = %00111111 : GoSub LcdWriteInstruction ; Switch LCD on. GoSub LcdClear ; Clear LCD ; Write the obligatory message to the LCD. ConsoleX = 0 : ConsoleY = 0 ConsoleChar = $08 : GoSub LcdPutChar ; H ConsoleChar = $05 : GoSub LcdPutChar ; E ConsoleChar = $0C : GoSub LcdPutChar ; L ConsoleChar = $0C : GoSub LcdPutChar ; L ConsoleChar = $0F : GoSub LcdPutChar ; O ConsoleChar = $1D : GoSub LcdPutChar ; , ConsoleChar = $00 : GoSub LcdPutChar ; ConsoleChar = $17 : GoSub LcdPutChar ; W ConsoleChar = $0F : GoSub LcdPutChar ; O ConsoleChar = $12 : GoSub LcdPutChar ; R ConsoleChar = $0C : GoSub LcdPutChar ; L ConsoleChar = $04 : GoSub LcdPutChar ; D ConsoleChar = $1B : GoSub LcdPutChar ; ! Pause 2000 B2 = 0 MainLoop: B2 = B2 - 1 B0 = B2 GoSub LcdGotoZ Pause 30 GoTo MainLoop LcdInit: DirsC = $00 ; Set data bus to input. High LcdStartEnable ; We're not writing anything. High LcdChipSelect1 High LcdChipSelect2 Low LcdReset Pause 500 High LcdReset Pause 500 Return LcdWriteInstruction: Low LcdReadWrite DirsC = $FF ; Data bus = output. PinsC = B0 ; Set data bus state. Low LcdRegisterSelection ; Instruction, not data. Low LcdStartEnable High LcdStartEnable DirsC = $00 ; Leave data bus floating. Return LcdWriteData: Low LcdReadWrite DirsC = $FF ; Data bus = output. PinsC = B0 ; Set data bus state. High LcdRegisterSelection ; Data, not instruction. Low LcdStartEnable High LcdStartEnable DirsC = $00 ; Leave data bus floating. Return LcdGotoX: B0 = B0 And 7 B0 = B0 + %10111000 GoTo LcdWriteInstruction LcdGotoY: B0 = B0 And 63 B0 = B0 + %01000000 GoTo LcdWriteInstruction LcdGotoZ: B0 = B0 And 63 B0 = B0 + %11000000 GoTo LcdWriteInstruction LcdClear: For B2 = 0 To 7 B0 = B2 GoSub LcdGotoX B0 = 0 GoSub LcdGotoY B0 = 0 For B3 = 0 To 63 GoSub LcdWriteData Next Next B2 Return LcdPutMap: B1 = B0 * 8 For B2 = 0 To 7 Read B1, B0 GoSub LcdWriteData B1 = B1 + 1 Next B2 Return LcdPutChar: B0 = ConsoleY GoSub LcdGotoX B0 = ConsoleX * 8 If B0 < 64 Then Low LcdChipSelect2 Else Low LcdChipSelect1 B0 = B0 - 64 EndIf GoSub LcdGotoY B0 = ConsoleChar GoSub LcdPutMap High LcdChipSelect1 High LcdChipSelect2 ConsoleX = ConsoleX + 1 If ConsoleX = 16 Then ConsoleX = 0 ConsoleY = ConsoleY + 1 If ConsoleY = 8 Then ConsoleY = 0 EndIf EndIf Return ; Font EEPROM $00,($00,$00,$00,$00,$00,$00,$00,$00,$7E,$7F,$09,$09,$7F,$7E,$00,$00) EEPROM $10,($7F,$7F,$49,$49,$7F,$36,$00,$00,$3E,$7F,$41,$41,$63,$22,$00,$00) EEPROM $20,($7F,$7F,$41,$63,$3E,$1C,$00,$00,$7F,$7F,$49,$49,$49,$41,$00,$00) EEPROM $30,($7F,$7F,$09,$09,$09,$01,$00,$00,$3E,$7F,$41,$49,$7B,$3A,$00,$00) EEPROM $40,($7F,$7F,$08,$08,$7F,$7F,$00,$00,$41,$41,$7F,$7F,$41,$41,$00,$00) EEPROM $50,($20,$61,$41,$7F,$3F,$01,$00,$00,$7F,$7F,$1C,$36,$63,$41,$00,$00) EEPROM $60,($7F,$7F,$40,$40,$40,$40,$00,$00,$7F,$7F,$06,$1C,$06,$7F,$7F,$00) EEPROM $70,($7F,$7F,$0C,$18,$7F,$7F,$00,$00,$3E,$7F,$41,$41,$7F,$3E,$00,$00) EEPROM $80,($7F,$7F,$09,$09,$0F,$06,$00,$00,$3E,$7F,$41,$31,$6F,$5E,$00,$00) EEPROM $90,($7F,$7F,$09,$19,$7F,$66,$00,$00,$26,$6F,$49,$49,$7B,$32,$00,$00) EEPROM $A0,($01,$01,$7F,$7F,$01,$01,$00,$00,$3F,$7F,$40,$40,$7F,$3F,$00,$00) EEPROM $B0,($1F,$3F,$60,$60,$3F,$1F,$00,$00,$7F,$7F,$30,$1C,$30,$7F,$7F,$00) EEPROM $C0,($63,$77,$1C,$1C,$77,$63,$00,$00,$07,$0F,$78,$78,$0F,$07,$00,$00) EEPROM $D0,($61,$71,$59,$4D,$47,$43,$00,$00,$00,$00,$5F,$5F,$00,$00,$00,$00) EEPROM $E0,($02,$03,$59,$5D,$07,$02,$00,$00,$00,$80,$E0,$60,$00,$00,$00,$00) EEPROM $F0,($00,$00,$60,$60,$00,$00,$00,$00,$07,$07,$00,$07,$07,$00,$00,$00)
The code isn't very robust - it doesn't check the state of the LCD's busy flag as I'm assuming that a 4MHz PIC running an interpreted BASIC is too slow to manage to write another byte to the LCD driver before it has finished processing the last one.
The font was generated from the following image (it's the BBC Micro font):
It's rotated through 90° as, unlike the LCD driver in the TI-83+, each byte written outputs 8 pixels vertically, with the least significant at the top. (On the TI-83+, each byte written outputs 8 pixels horizontally, with the most significant bit on the left). More interestingly, this graphical LCD is made up of two 64×64 regions next to eachother, and by controlling two chip select pins you can control whether each byte written updates the left side, the right side, neither or both. I'm entirely sure how I could use this, though, other than not-very-exciting tricks like clearing the LCD extra-fast.

{kind=link}
Finally, here's a video of the LCD test in action. It's not very speedy, but will hopefully pick up some speed once I figure out how I'm going to use that Z80180 CPU.
Subscribe to an RSS feed that only contains items with the Z80 computer tag.